Filters
Annex A to AMC1 Article 11
ED Decision 2025/018/R
GUIDELINES ON COLLECTING AND PRESENTING INFORMATION ON SYSTEMS AND OPERATIONS REGARDING UAS OPERATIONS CONDUCTED IN THE ‘SPECIFIC’ CATEGORY
The purpose of this Annex is to provide guidance to UAS operators for collecting and presenting evidence and data required when compiling an application to obtain operational authorisation for UAS operations in the ‘specific’ category.
This document does not replace civil regulations but provides recommendations and guidance as to how UAS operators can comply with those regulations using the SORA process.
This document is composed of the following five chapters:
—A.1: Key principles for completing the application documents for UAS operations to be conducted in the ‘specific’ category
It explains the different documents and how to use them to compile an application.
—A.2: SORA risk assessment template
It is intended to support UAS operators in compiling all the information necessary to perform a risk assessment.
—A.3: Structure of the operations manual
It provides an operations manual model structure for UAS operators to follow in order to present their operations manual in an appropriate manner.
—A.4: Compliance matrix
It provides a template for UAS operators on how to present the reference between the SORA-driven requirements and the operations manual.
—A.5: How to document and present a flight area
It contains guidance for UAS operators on how to create and include a flight area into the operations manual.
A.1 Key principles for completing the application documents for UAS operations to be conducted in the ‘specific’ category
How does an application generally work?
The operations manual serves as the basis for an operational authorisation for UAS operations to be conducted in the ‘specific’ category. When the competent authority issues the operational authorisation, it accepts the related operations manual.
General workflow
Before starting collecting information and describing procedures, the UAS operator should outline a preliminary operational concept (refer to Section S.4.1 of this AMC). This preliminary operational concept ensures that the UAS operator can effectively explore all available options, and select the most suitable approach for its specific needs.
Key considerations for this initial plan include the following:
—the intended flight location(s);
—the maximum operational flight altitude and speed;
—the flight mode: either VLOS or BVLOS with or without AOs;
—the type of UAS to be used;
—environmental limitations (time of day, weather).
In the next step, the UAS operator assesses the risk for the operation and develops a high-level overview of the SORA requirements. For this, the UAS operator should apply the requirements of Section A.2 and follow each step of the SORA process.
When SORA phase 1 (see Figure A.1) is completed, it is considered best practice for a UAS operator to liaise with the competent authority before moving to the data collection and procedure description (refer to Section S.3.3 of this AMC) to share its preliminary operational information and initial risk assessment. The competent authority and the UAS operator evaluate the alignment of the risk assessment with the operational information and check the correct application of the SORA steps. The competent authority may provide feedback to the UAS operator on its expectations on how to achieve an operational authorisation considering the resulting SAIL.
Once the risk assessment (i.e. the outcome of SORA Phase 1) has been validated and the UAS operator has secured confirmation from the competent authority, the next step involves identifying the specific requirements that arise from the risk assessment (i.e. conduct SORA phase 2 and develop the evidence in support of compliance with the applicable OSOs, mitigations and containment). Following this identification, the UAS operator should then collect the relevant evidence and information, as well as describe the procedures that will be implemented. The UAS operator should ensure that all integrity and corresponding assurance requirements are met. These can be found in Annexes B to E to this AMC. It is recommended to use the operations manual structure provided in Chapter A.3 for this purpose.
The UAS operator should use the template provided in Chapter A.4 (Compliance matrix) once all procedures are described and evidence is collected. This is done by providing the corresponding reference to the integrity and/or assurance evidence for each requirement. This document serves as a checklist for the UAS operator to review before submitting an application. The competent authority may use this document as a reference to assist the review process.
The competent authority reviews the application in accordance with the requirements arising from the risk assessment and the respective SAIL. In this process, the implementation of all technical and operational requirements is checked based on the descriptions in the operations manual, or other associated documents as required. The competent authority has the option to request the UAS operator to revise the documents and resubmit them, or ask for additional supporting documentation.
For the UAS operator to address the additional requests effectively, the competent authority may also provide guidance on how the UAS operator can proceed to close any outstanding issues.
Figure A.1 graphically depicts the process described above and thus serves as an additional illustration of the general workflow.
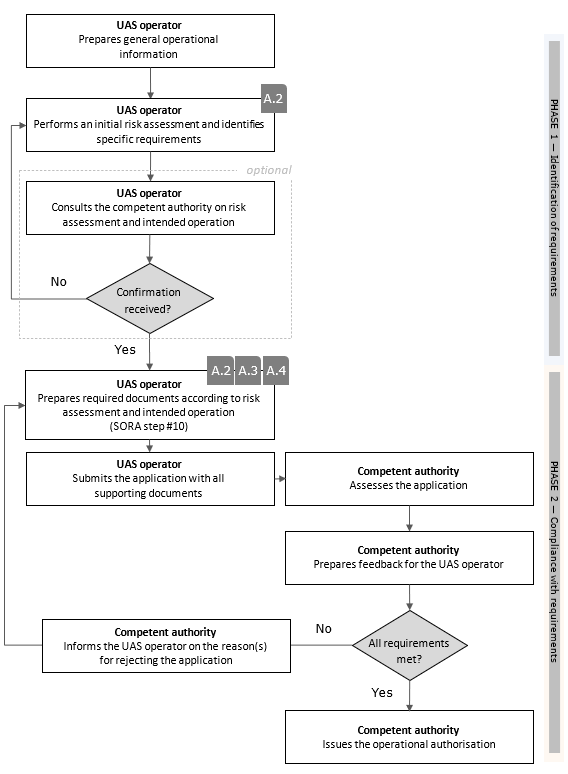
Figure A.1 — Recommended level of detail and use of supporting documents and references
The operations manual and its associated annexes should enable the UAS operator to describe how to conduct the operation safely for the benefit of its staff. It should include the identification of the flight area, all normal, contingency and emergency procedures and additional information derived by the compliance with the required OSOs, mitigations and containment requirements.
Supporting documents serving as evidence for the compliance with the required OSOs, mitigations and containment requirements may be referenced in the operations manual and can be linked in the compliance matrix (see Section A4) and be included in a separate document. Evidence developed in support of requirements having a low level of robustness (related to the OSOs, based on the SAIL of the operation or to the level of mitigation and or to the containment chosen by the UAS operator) may be kept internal to the UAS operator’s organisation. The same applies in case the level of robustness of the requirements is medium and the UAS operators decided to use AMC published by EASA. The competent authority may require those evidence during the oversight audit or anytime. In case the level of robustness of the requirements is high or it is medium and the UAS operators decided not to use AMC published by EASA, then the evidence should be provided with the application of the operational authorisation.
The competent authority may request further documents if considered necessary by the competent for the given operation.
Document set-up for additional flight areas, UAS or UAS operations
When a UAS operator seeks to expand its approved operations manual(s) to include a new flight area, a UAS or a UAS operation, the primary question is whether the underlying risk assessment covers these additions. If it does, the new information can be incorporated into existing parts (see Chapter A.3 of this Annex — Part A to T) of the operations manual(s). Otherwise, it is considered best practice to establish new parts for such information.
When dealing with complex UAS operations (e.g. multiple types of UAS operations and multiple UAS employed), the UAS operator may find it useful to use a different structure of the operations manual compared to that proposed by this Annex. In this case, it is recommended to discuss the proposed manual’s structure with the competent authority to ensure it meets both national and industry standards.
Operation-specific details should typically be organised into separate parts for clarity during approval and ease of use. Conversely, general or related information can be consolidated into a common segment. An example would be adding an additional UAS with the same characteristic dimensions, but a different set of procedures. This could be added to existing Part B; for illustration purposes, see Figure A.2.
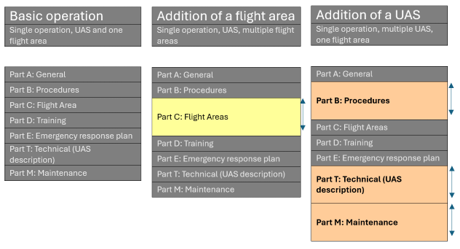
Figure A.2 — Common scenarios and how they may impact the operations manual
A.2 SORA risk assessment template
Introduction
This chapter serves as a guide to assist UAS operators in compiling all the necessary information for conducting a risk assessment. UAS operators should submit an application for an operational authorisation using the form provided in AMC1 UAS.SPEC.030(2). By providing this questionnaire-style template for documenting the risk assessment, UAS operators are encouraged to focus on the essential information required and to avoid unnecessary lengthy explanations about their operational procedures.
The ‘remarks’ section is optional and is designed for UAS operators to provide additional information when needed, helping to prevent misunderstandings. At this stage, no evidence is required as the requirements are determined by the risk analysis process.
Once the application form is completed, both the UAS operator and the competent authority will have all the necessary information to complete Phase 1 assessment (for reference, see Figure A.1). Note that for Phase 1 the fields 2.9 (OM references) and 2.10 (compliance evidence file reference) of the application form (AMC1 UAS.SPEC.030(2)) may not be filled in yet.
In situations involving the use of multiple UA or flight areas with varying ground or air risk classes, it is advisable to consult with the competent authority. This practice helps ensuring alignment with competent authority expectations and adherence to national standards. In certain cases, it may be possible to include multiple UA or flight areas into one form.
Evidence should not be included in the application form. Instead, it should be incorporated into the operations manual (Chapter A.3 ‘Structure of the operations manual’) and referenced in the CSP (Chapter A.4 ‘Compliance matrix’).
A.3 Structure of the operations manual
Introduction
The intention of this chapter is to provide a standardised framework for documenting essential information that relates to a specific operation. It serves only as an example structure for UAS operators to create a comprehensive document that outlines the procedures and relevant details necessary for the safe and efficient execution of a UAS operation51.
In the example structure, the operations manual is divided into logical subject parts, which in turn offer a structure as regards where to include specific topics that are crucial for creating a standardised manual for the safe operation of UAS.
While the structure is not inherently mandatory, the topics it contains should be incorporated into the operations manual as needed for the specific operation(s) to provide the relevant information and evidence required for the safe operation of UAS. It is advisable to adhere to the provided structure, as it aligns with the expectations and practices of most competent authorities. An example of an operations manual may be found on the EASA website52.
In general, any information that does not have direct operational relevance to the UAS operator or its staff should be placed in the relevant annex to ensure the document remains concise and reader-friendly.
The main purpose of this structure is the following:
1.Standardisation: It ensures that all critical aspects of the UAS operation are documented consistently, following applicable industry standards and regulations, and best practices.
2.Compliance: It helps operators meet regulatory requirements by specifying the information and procedures needed to obtain necessary approvals and certification.
3.Clarity: It provides a clear and organised structure for conveying operational procedures, safety protocols and other essential information, thus reducing the risk of misunderstandings and errors.
4.Safety: It emphasises safety measures, emergency procedures and risk-mitigation strategies to enhance the overall safety during the operation.
5.Efficiency: It streamlines the process of creating an operations manual by providing predefined sections and guidelines, helping UAS operators save time and effort.
6.Consistency: It ensures that all UAS operators that are involved in the operation of the same UAS type follow the same documented procedures, promoting uniformity and reducing the potential for confusion.
7.Reference: It serves as a valuable reference document for UAS operators, remote crew members, competent authorities and other stakeholders involved in, or overseeing, the UAS operation.
8.Documentation: It aids in the systematic recording of operational details, making it easier to track changes, updates, and compliance with evolving regulatory requirements.
Recommended structure for the operations manual
Cover page
Document control
Other applicable documents
Purpose and scope of this document
List of contents
List of definitions and abbreviations
1Part A — General Part
1.1Opening statement
1.2Security and privacy statement
1.3Environmental statement
1.4The operating organisation
1.4.1Structure / organisation chart
1.4.2Duties and responsibilities of the personal
1.5Change management
1.6Retention periods
1.7Document control
1.8Requirements and qualifications for personnel
1.8.1Remote pilot
1.8.2Maintenance personnel
1.8.3Ground staff
1.8.4Training, examination and supervision personnel
1.9Crew member is ‘fit for the operation’
1.9.1Preventive health care
1.9.2Duty hours and rest periods
2Procedures (Part B)
2.1Multi-crew coordination
2.2Flight planning
2.2.1Use of up-to-date information
2.2.2Geographical zones
2.3External services and systems
2.3.1Services
2.3.2Systems
2.4Procedures for obtaining information about and evaluating weather conditions
2.5Procedures for responding to unexpected adverse weather conditions
2.6Procedures for tactical mitigation performance requirements (TMPRs)
2.7Occurrence reporting
2.7.1What must be reported?
2.7.2Who must report?
2.7.3What must be observed after reporting?
2.8Procedures specifically for UAS 1
2.8.1Normal procedures
2.8.2Contingency procedures
2.8.3Emergency procedures
2.9Procedures specifically for UAS 2
2.9.1Normal procedures
2.9.2Contingency procedures
2.9.3Emergency procedures
3Part C — Flight areas
3.1General operational limitations
3.1.1Environmental conditions
3.1.2Technical operational limitations
3.2Flight area 1
3.2.1Description
3.2.2Calculation of the contingency volume (CV) / ground risk buffer (GRB)
3.2.3Specific procedures for flight area 1
3.2.4Emergency response plan (ERP) — Local information
3.3Flight area 2
3.3.1Description
3.3.2Calculation of the contingency volume (CV) / ground risk buffer (GRB)
3.3.3Specific procedures for flight are 2
3.3.4Emergency response plan (ERP) — Local information
3.4Flight area 3
3.4.1Description
3.4.2Calculation of the contingency volume (CV) / ground risk buffer (GRB)
3.4.3Specific procedures for flight area 3
3.4.4Emergency response plan (ERP) — Local information
4Part D — Training
5Part E — Emergency response plan (ERP)
5.1General
5.2Creation of the ERP
5.3ERP template
5.4Preparation and briefing
5.5Reporting procedures and obligations after an emergency
6Part T — Technical part of the UAS
6.1UAS 1 [Model/Type]
6.1.1Description
6.1.2Image/graphic
6.1.3C3 link
6.1.4Parachute (M2)
6.1.5TMPRs
6.1.6Containment
6.1.7Human–machine interface (HMI)
6.1.8Payload
6.1.9Automatic protection of the flight envelope
6.1.10Designed and qualified to operate in adverse environmental conditions
6.2UAS 2 [Model/Type]
6.2.1Description
6.2.2Image/graphic
6.2.3C3 link
6.2.4Parachute (M2)
6.2.5TMPRs
6.2.6Containment
6.2.7Human–machine interface (HMI)
6.2.8Payload
6.2.9Automatic protection of the flight envelope
6.2.10Designed and qualified to operate in adverse environmental conditions
7Part M — Maintenance
7.1General
7.2Software updates
7.3Maintenance of UAS 1 [Model/Type]
7.4Maintenance of UAS 2 [Model/Type]
8Annex
8.1Evidence
8.1.1Organisational evidence
8.1.1.1Organisational operating certificate
8.1.1.2Maintenance programme / organisation certificate
8.1.2Operational evidence
8.1.2.1Operational agreements (e.g. with ATC)
8.1.2.2M1
8.1.2.3Flight tests
8.1.2.4Performance of external services and systems
8.1.3Technical evidence
8.1.3.1Design (DVR, TC)
8.1.3.2M2
8.1.3.3Manufacturer competence
8.2Printed forms
8.2.1List of maintenance personnel
8.2.2List of personnel authorised to conduct pre-flight and post-flight inspections
8.2.3List of the training/experience level of personnel
8.2.4List of authorised remote pilots
8.2.5List of personnel trained in the emergency response plan (ERP)
8.2.6Operator flight logbook
8.2.7Technical logbook
8.3Checklists
8.3.1ERP template
8.3.2Pre-flight inspection — Checklist
8.3.3Post-flight inspection — Checklist
8.4Manuals
8.4.1Maintenance manual for UAS 1
8.4.2Maintenance manual for UAS 1
Reference table for the requirements specified in the annexes to AMC1 (SORA)
The following table offers a comprehensive overview of the suitable locations within the operations manual where the requirements specified in the annexes to AMC1 (SORA) can be sensibly incorporated.
OSOs ↓ | Integrity (I) / Assurance (A) | Criterion | OM |
OSO #01 | I | — | Part A Part D |
A | — | Annex 8.1.1.1 | |
OSO #02 | I | — | Part T |
A | — | Annex 8.1.3.3 | |
OSO #03 | I | — | Part M Chapter 7.1 Annex 8.1.1.2 |
A | #1 | Part A Chapter 1.7 Annex 8.1.1.2 | |
#2 | Part A Chapter 1.7 Annex 8.1.1.2 | ||
#3 | Part A Chapter 1.6 Part A Chapter 1.7 Annex 8.1.1.2 | ||
OSO #04 | I | — | Part T |
A | — | Annex 8.1.3.1 | |
OSO #05 | I | — | Part T |
A | — | Annex 8.1.3.1 | |
OSO #06 | I | — | Part T Chapter 6.1.3 |
A | — | Annex 8.1.3.1 | |
OSO #07 | I | — | Part B Chapter 2.8.1 Part D Annex 8.2.6 |
A | #1 | Part A Chapter 1.7 | |
#2 | Part A Chapter 1.7 | ||
OSO #08 | I | #1 | Part B Part D Annex 8.3 |
#2 | Part B Part D | ||
#3 | Part E | ||
A | — | Part B Part D Annex 8.1.2.3 Part E Annex 8.3.1 | |
OSO #09 | I | — | Part A Chapter 1.7 |
A | — | Part D | |
OSO #13 | I | — | Part B Chapter 2.3 |
A | — | Part B Chapter 2.3 Annex 8.1.2.4 | |
OSO #16 | I | #1 | Part B Chapter 2.1 |
#2 | Part D | ||
A | #1 | Part B Chapter 2.1 Annex 8.1.2.3 | |
#2 | Part D | ||
#3 | Annex 8.1.2.4 | ||
OSO #17 | I | — | Part A Chapter 1.9 |
A | — | Part A Chapter 1.9 | |
OSO #18 | I | — | Part T |
A | — | Annex 8.1.3.1 | |
OSO #19 | I | — | Part B Chapter 2.8 |
A | — | Annex 8.1.3.1 | |
OSO #20 | I | — | Part T Chapter 6.1.7 |
A | — | Annex 8.1.3.1 | |
OSO #23 | I | — | Part B Chapter 2.4 Part C Chapter 3.1.1 Part D |
A | — | Part C Chapter 3.1 Part B Chapter 2.4 Annex 8.1.2.3 Part D | |
OSO #24 | I | — | Part T |
A | — | Annex 8.1.3.1 | |
M1 | I | — | Part C Chapter 3.2.3.2 |
A | — | Annex 8.1.2.2 | |
M2 | I | — | Part T |
A | — | Annex 8.1.3.2 | |
ARC mitigation | I | — | Part C Chapter 3.2.3.3 |
A | — | Annex 8.1.2.1 | |
TMPRs | I | — | Part B Chapter 2.8.3.4 Part B Chapter 2.8.3.5 Part T Chapter 6.1.5 |
A | — | Annex 8.1.3.1 | |
Containment | I | — | Part T Chapter 6.1.6 |
A | — | Annex 8.1.3.1 | |
Payload | I | — | Part T Chapter 6.1.8 |
A | — | Annex 8.1.3.1 |
A.4 Compliance matrix
Introduction
This chapter provides a template for UAS operators on how to present the reference between the SORA-driven requirements and the operations manual from Chapter A.3 of Annex A to this AMC to the competent authority.
For all the requirements that should be fulfilled in order to conduct a safe UAS operation, the UAS operator should put the specific reference into the compliance matrix table where it can be found.
This is not a list of evidence, but the reference where it can be found.
Example:
… | ||
Requirement | Level of robustness | Reference to documentation |
OSO #08 | ☒ Low ☐ Medium ☐ High | Document name: MyOperationsManual.pdf Chapter or page number: Chapter B, pp. 42–47 Chapter Annex, p. 815 |
… |
(The level of robustness in this case is SAIL dependent, and should be checked accordingly (e.g. ‘low’ for SAIL II.
Compliance matrix | |||
Requirement | Level of robustness | Reference to documentation | |
Ground risk mitigations | |||
M1(A) Strategic mitigations — Sheltering | ☐ None ☐ Low ☐ Medium | Document name: _____________________________ Chapter or page number: _____________________________ | |
M1(B) Strategic mitigations — Operational restrictions | ☐ None ☐ Medium ☐ High | Document name: _____________________________ Chapter or page number: _____________________________ | |
M1(C) Tactical mitigations — Ground observation | ☐ None ☐ Low | Document name: _____________________________ Chapter or page number: _____________________________ | |
M2 — Effects of UA impact dynamics are reduced | ☐ None ☐ Medium ☐ High | Document name: _____________________________ Chapter or page number: _____________________________ | |
Strategic air risk mitigations | ||
Air risk class (ARC) mitigation | ☐ ARC-d (AEC 1 or 2) 🡪 ARC-c ☐ ARC-d (AEC 1 or 2) 🡪 ARC-b ☐ ARC-d (AEC 3) 🡪 ARC-c ☐ ARC-d (AEC 3) 🡪 ARC-b ☐ ARC-c (AEC 4) 🡪 ARC-b ☐ ARC-c (AEC 5) 🡪 ARC-b ☐ ARC-c (AEC 6,7,8) 🡪 ARC-b ☐ ARC-c (AEC 9) 🡪 ARC-b | Document name: _____________________________ Chapter or page number: _____________________________ |
Tactical mitigation performance requirements (TMPRs) | ||
TMPR level | ☐ VLOS (deconfliction scheme) ☐ BVLOS ☐ No requirement (ARC-a) ☐ Low requirement (ARC-b) ☐ Medium requirement (ARC-c) ☐ High requirement (ARC-d) | Document name: _____________________________ Chapter or page number: _____________________________ |
TMPR function | Detect | Document name: _____________________________ Chapter or page number: _____________________________ |
Decide | Document name: _____________________________ Chapter or page number: _____________________________ | |
Command | Document name: _____________________________ Chapter or page number: _____________________________ | |
Execute | Document name: _____________________________ Chapter or page number: _____________________________ | |
Feedback loop | Document name: _____________________________ Chapter or page number: _____________________________ | |
TMPR robustness | TMPR integrity and assurance objectives | Document name: _____________________________ Chapter or page number: _____________________________ |
Containment requirements | ||
Containment | ☐ Low ☐ Medium ☐ High ☐ Tethered | Document name: _____________________________ Chapter or page number: _____________________________ |
Operational safety objectives (OSOs) | ||
OSO #01 Ensure that the UAS operator is a competent and/or proven organisation | ☐ NR ☐ Low ☐ Medium ☐ High | Document name: _____________________________ Chapter or page number: _____________________________ |
OSO #02 UAS designed and produced by a competent and/or proven organisation | ☐ NR ☐ Low ☐ Medium ☐ High | Document name: _____________________________ Chapter or page number: _____________________________ |
OSO #03 Maintenance of the UAS | ☐ Low ☐ Medium ☐ High | Document name: _____________________________ Chapter or page number: _____________________________ |
OSO #04 UAS components essential for its safe operation are designed to an Airworthiness Design Standard (ADS) | ☐ NR ☐ Low ☐ Medium ☐ High | Document name: Chapter or page number: _____________________________ |
OSO #05 UAS is designed considering system safety and reliability | ☐ NR ☐ Low ☐ Medium ☐ High | Document name: _____________________________ Chapter or page number: _____________________________ |
OSO #06 C3 link characteristics (e.g. performance spectrum use) are appropriate for the UAS operation | ☐ NR ☐ Low ☐ Medium ☐ High | Document name: _____________________________ Chapter or page number: _____________________________ |
OSO #07 Conformity check of the UAS configuration | ☐ Low ☐ Medium ☐ High | Document name: _____________________________ Chapter or page number: _____________________________ |
OSO #08 Operational procedures are defined, validated and adhered to | ☐ Low ☐ Medium ☐ High | Document name: _____________________________ Chapter or page number: _____________________________ |
OSO #09 Remote crew trained and current | ☐ Low ☐ Medium ☐ High | Document name: _____________________________ Chapter or page number: _____________________________ |
OSO #13 External services supporting UAS operations are adequate for the UAS operation | ☐ Low ☐ Medium ☐ High | Document name: _____________________________ Chapter or page number: _____________________________ |
OSO #16 Multi-crew coordination | ☐ Low ☐ Medium ☐ High | Document name: _____________________________ Chapter or page number: _____________________________ |
OSO #17 Remote crew is fit to operate | ☐ Low ☐ Medium ☐ High | Document name: _____________________________ Chapter or page number: _____________________________ |
OSO #18 Automatic protection of the flight envelope from human errors | ☐ NR ☐ Low ☐ Medium ☐ High | Document name: _____________________________ Chapter or page number: _____________________________ |
OSO #19 Safe recovery from human error | ☐ NR ☐ Low ☐ Medium ☐ High | Document name: _____________________________ Chapter or page number: |
OSO #20 A human factors evaluation has been performed and the human–machine interface (HMI) has been found appropriate for the intended UAS operation | ☐ NR ☐ Low ☐ Medium ☐ High | Document name: _____________________________ Chapter or page number: _____________________________ |
OSO #23 Environmental conditions for safe operations are defined and measurable | ☐ Low ☐ Medium ☐ High | Document name: _____________________________ Chapter or page number: _____________________________ |
OSO #24 The UAS is designed and qualified to operate in adverse environmental conditions | ☐ NR ☐ Medium ☐ High | Document name: _____________________________ Chapter or page number: _____________________________ |
Confirmation | ||
Have all safety requirements been described and met? | ☐Yes ☐No | |
Place, date | Name and signature | |
A.5 How to document and present a flight area
Introduction
This chapter provides guidelines, typically located under Part C ‘Flight areas’ of the operations manual, on how to prepare and present a flight area. The goal is to present the proposed flight area in a way that is both straightforward and easy to understand. This is crucial not only for the competent authority reviewing this section, but especially for all staff that participate in the flight operation and consult the operations manual.
It is worth noting that this section is also relevant for operators that have the privilege to analyse, approve and document flight areas independently, such as those approved under a generic operational authorisation.
For better usability, Chapter A.5 is divided into two sections:
—Section A.5.1 provides a comprehensive guide on creating a *.kml file, which is a file format for displaying information in a geographic context. It also specifies the basic necessities for the illustration and delves into the methods of depicting the flight area, as well as explaining the underlying reasons for these representations in the operations manual.
—Section A.5.2 provides a sample computation for determining the minimum dimensions of the contingency volume and the ground risk buffer. These examples are intended solely as illustrative calculations. For a more in-depth analysis, one may also employ sophisticated flight-mechanics-based computations. These calculations can be incorporated into the operations manual annex. UAS operations covered by standard scenarios (STS) or predefined risk assessments (PDRAs) should use at least the values defined in the STS or the PDRA.
While adhering to these guidelines, it is important to cite the source used for the calculations. If the UAS operator chooses to use alternative calculations, it is important to provide clear explanation and supporting documentation that outline the methodology and its safety assurances.
A.5.1 Presentation
The provided graphical representation of the flight area should contain as a minimum:
—an area: flight geography in transparent green colour;
—an area: contingency volume in transparent yellow colour;
—an area: ground risk buffer in transparent red colour;
—a position: remote pilots’ position (for VLOS operations);
—a position: remote pilots’ position and AO position (for BVLOS operations with AOs);
—a position: take-off / landing position (optional).
The UAS operator should provide the flight area to the competent authority when required. This should be in the format of a *.kml file or a similar format suitable for visualisation, accompanied by the operations manual or a referenced document that includes all pertinent flight area details. There are two methods for delineating the flight area: ‘inside out’ or ‘reverse’. The choice between them largely depends on the constraining factor. For many applications, the ‘inside out’ method will provide the desired areas based on the specific flight geography.
However, there may be situations where it is preferable to utilise the maximum available ground risk buffer (e.g. controlled ground) and then determine the maximum possible flight geography from that. This is called ‘reverse’ computation of the flight area.
Inside out:Reverse:
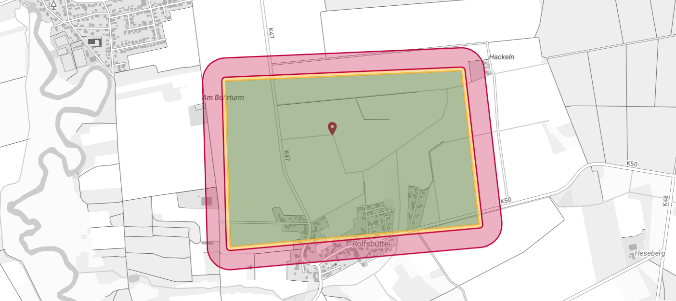
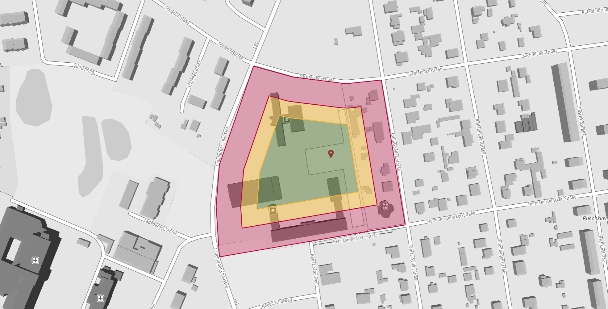
Figure 9 — ‘Inside out’ versus ‘reverse’ computation of the flight area
Areas within the flight geography that need to be excluded for any reason (e.g. higher ground risk) should be addressed in the same way as to surround them with a contingency volume and a ground risk buffer.
A screenshot of the flight area, accompanied by a concise description, all input values, and the calculations for contingency volume (CV) and ground risk buffer (GRB) should be documented. For instance, in Part C of the operations manual according to Chapter A.3.
The content should be presented in a manner that is easily comprehensible to all parties involved in the operation, enabling swift access to all pertinent data during routine operations. It is also crucial for the competent authority to understand the calculation process. If the derivation of the calculation or the overall rationale is unusually extensive, it is advisable to relocate the sections not directly pertinent to daily operations to the operations manual annex.
Example:
Detailed information for each flight area is typically located under Part C, following the recommended format outlined in Chapter A.3 ‘Structure of the operations manual’.
In a structured chapter layout, this may appear as follows:
3 Part C — Flight Areas
3.2 Flight area [project name]
Description
The flight area, along with its precise coordinates, is delineated in the accompanying *.kml file ‘[project name.kml]’.
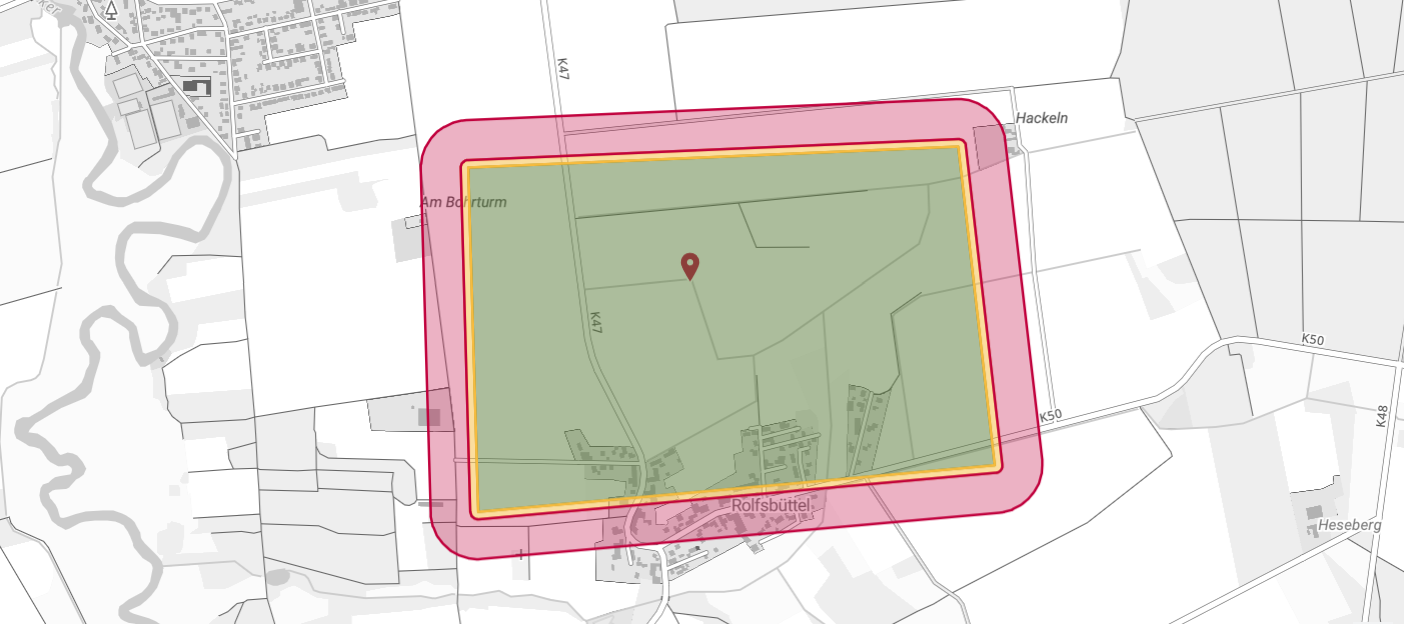
Figure 7 — Graphical representation of a flight area
The centre of the figure is located at [N53.1234567 E11.1234567].
The remote pilot’s position is located at [N53.1434567 E11.1434567].
General comment: [The flight area is an area used for agricultural purposes, etc.]
Special procedures/mitigations: [CTR Clearance for airport XY is required, as per OM 2.2]
Calculation of the contingency volume (CV) and the ground risk buffer (GRB)
The CV and the GRB were determined using the formulas described in paragraph A.5.2 of this annex.
UA characteristics:
—type: [rotary wing without parachute];
—altitude measurement: [barometric];
—maximum speed in operation V0: [10,0 m/s];
—maximum permissible wind speed VWind: [3,0 m/s];
—characteristic dimension CD: [1,50 m];
—maximum pitch angle Θmax: [45°].
The following parameters were used:
—height of the flight geography HFG: [100,0 m];
—calculation method: [from inside];
—manoeuvre on entering into the contingency volume (horizontal): [stopping];
—manoeuvre on entering the contingency volume (vertical): [kinetic into potential];
—manoeuvre on entering the ground risk buffer: [power off].
Assumptions:
—GNSS accuracy SGNSS: [0,5 m];
—position holding error SPos: [3,0 m];
—map error SK: [1,0 m];
—reaction time tR: [1,0 s];
—altitude measurement error HAM: [HBaro = 1,0 m];
—additional distance (horizontal) SAdd: [0,0 m];
—additional distance (vertical) HAdd: [0,0 m].
Reasons for deviations from the standard values:
—SGNSS ([0,5 m] instead of [3,0 m]): [The UA is equipped with …];
—…;
—HCM ([3,0 m] instead of [5,1 m]): [The assumption based on …].
Results
Flight altitude:
—Altitude of the flight geography HFG: [100,0 m].
Contingency volume:
—Horizontal SCV: [34,5 m];
—Vertical HCV: [113,1 m].
Ground risk buffer:
—Horizontal SGRB: [113,8 m].
Adjacent ground area:
—Horizontal SAA: [5000 m].
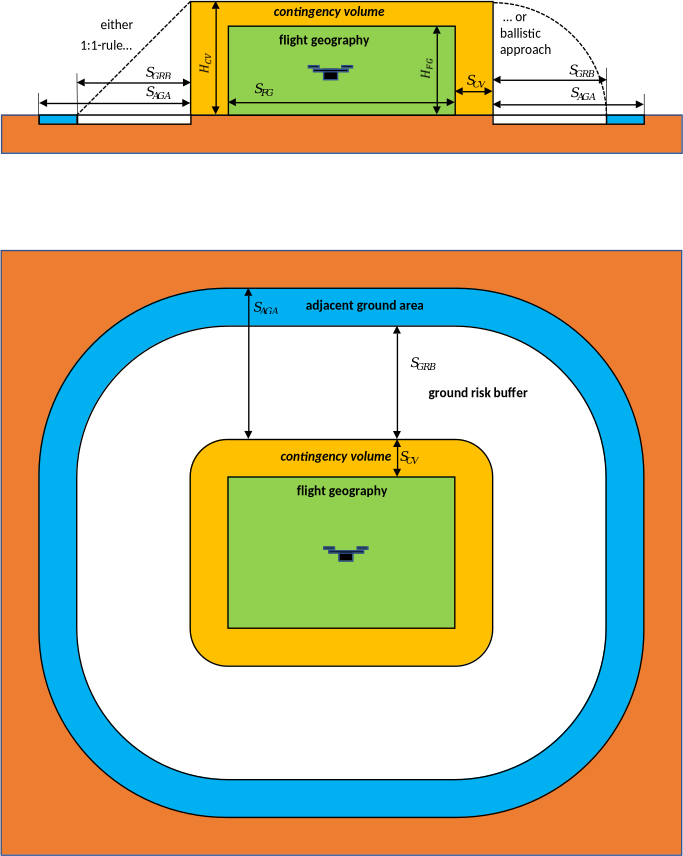
Figure 8 — Schematic representation of the flight geography, the contingency volume and the ground risk buffer
A.5.2 Calculations used in the example case in the paragraph above
A.5.2.1 Information required for the calculations
, m/s | Maximum operational speed that is flown. This corresponds to the information in point 3.6 in the operational authorisation application form provided in Note: A speed below 3 m/s for multirotor and 1.25 for fixed-wing aircraft is not considered realistic. |
CD, m | For the ‘maximum UA characteristic dimension (CD)’, please refer to definition I.141 ‘UA characteristic dimensions’ in Annex I to this AMC. Propellers and rotors are part of the geometry, whereby their most unfavourable position is considered. This corresponds to the information in point 3.4 of the operational authorisation application form provided in AMC1 UAS.SPEC.030(2). |
, m/s | Maximum wind speed specified in the operations manual up to which the UA may be operated. |
FG | Flight geography |
CV | Contingency volume |
GRB | Ground risk buffer |
A.5.2.2 Computation of the flight geography
Variant 1 (‘inside out’)
The size of the flight geography usually results from the operator’s desired flight geography. The contingency volume and the ground risk buffer just add up to this area.
Variant 2 (‘reverse’)
Determination of the maximum flight geography available, e.g. when operating over a controlled ground area.
In this example (controlled ground), the ground projection of the flight geography, the contingency volume and the ground risk buffer should be completely contained in the controlled ground area. A calculation in reverse is recommended.
The outer limit of the ground risk buffer corresponds to the topology of the controlled ground area.
In the first step, the horizontal extent (width) of the ground risk buffer is subtracted from the topology of the controlled ground area. This gives the boundary between the contingency volume and the ground risk buffer.
In the second step, the horizontal extent (width) of the contingency volume is then subtracted from this limit. This results in the maximum possible expansion of the flight geography as the remaining area.
Notes on the realistic definition of particularly small flight geographies:
Flight geography (FG) horizontal | |
Width of the flight geography: | |
Flight geography (FG) vertical | |
Height of the flight geography: | |
Note: Values smaller than and are considered unrealistic, also for automated waypoint flights. | |
A.5.2.3 Computation of the contingency volume
Notes on the realistic dimensioning of the contingency volume. Assumptions can be substituted with real values if evidence is available:
Contingency volume horizontal | |
GNSS accuracy: | |
Position holding error: | |
Map error: | |
Reaction distance: | Manual initiation of measures Reaction time: , with results in Note: may also be smaller in fully automatic systems (e.g. geofence). |
Contingency manoeuvres: | Multirotor — stopping Based on follows for a thrust to weight ratio of at least 2 and a maximum pitch angle of less than 45 degrees The minimum distance for stopping to hovering mode is: Fixed-wing aircraft –180° turn: Assumption: roll angle The radius for the turn is: |
Alternative contingency manoeuvre parachute: | Flight terminated with parachute triggered when leaving the FGTime to open the parachute |
Horizontal extension of the contingency volume: | |
Examples | |
Example: multirotors , , | |
Example: fixed-wing aircraft , | |
Contingency volume vertical | |
Altitude measurement error: | for barometric altitude measurement or for GNSS-based altitude measurement. Note: When operating close to large buildings or between buildings in narrow streets, the altitude information provided by GNSS may not be reliable. |
Reaction distance: | Manual initiation of measures Reaction time: , with 45° pitch angle
Note: may also be smaller in fully automatic systems (e.g. geofence). If external services are used for command and control, their system latency should be taken into consideration. |
Contingency manoeuvres: | For multirotor The forward kinetic energy is completely converted into potential energy. This results in For fixed-wing aircraft Exit the FG upwards with a 45° pitch angle, then fly on a constant circular path with V0 and radius r until level flight is achieved. With results in the contingency manoeuvre height being approximately |
Alternate contingency manoeuvre parachute: | Flight terminated with parachute triggered when leaving the FG Exit FG with 45° pitch angle Time to open the parachute |
Contingency volume: | |
Examples | |
Height of the flight geography | |
Example: multirotor: | |
Example: fixed-wing a/c: | |
A.5.2.4 Computation of the ground risk buffer
Ground risk buffer horizontal | |
Simplified approach: 1:1 rule: | |
Ballistic approach: Note: Only permitted for rotorcraft and multirotors! |
|
Termination with parachute: Note: Values below are not considered realistic for this computation. | Time to open the parachute From the rate of descent with the parachute open () and the maximum permissible wind speed for operation () results in |
Termination with fixed-wing aircraft: | —Power is switched off: A glide ratio of results in —Power is switched off and the flight control surfaces are permanently set in a way that no gliding is possible: The simplified approach can be chosen (1:1 rule). |
Examples | |
Simplified approach: Multirotor: , , | |
Ballistic approach: Multirotor: , , | |
Fixed-wing aircraft if only power is switched off: , , , E=20 | |
Fixed-wing aircraft if power is switched off and flight control surfaces set so that no gliding is possible: , , | |
GRB vertical | — not applicable — |
A.5.2.5 Examples of computation of maximum distance(s) for VLOS / BVLOS with AOs
When determining the operating range for VLOS or BVLOS with AO operations, care should be taken to ensure that the remote pilot can actually operate the UAS within their visual range or within the visual range of the AOs.
To check whether the described UAS operation is in VLOS or in BVLOS, the following calculations may be used.
VLOS / BVLOS with AO limit | In VLOS or in BVLOS with AOs the air risk is mitigated by having the UA in sight of the remote pilot or of the AO. The maximum possible distance between the remote pilot or the AO and the UA results from the smaller value of ALOS and DLOS. Anything beyond that is considered BVLOS. |
ALOS | Attitude line of sight (ALOS) The ALOS defines the maximum distance up to which a remote pilot can detect the position and orientation of the UA. Up to this limit, the remote pilot is able to control the flight path of the UA and is able to determine the attitude and position of the UA. This distance was determined in practical tests. |
DLOS | Detection line of sight (DLOS) The DLOS defines the distance up to which the UA could theoretically fly while at the same time other aircraft in the same direction can be visually detected, and sufficient time is available for an avoidance manoeuvre. The ground visibility is crucial for this. |
GV | Ground visibility (GV) The GV depends on the operational area and the meteorological conditions, and should be determined at the respective time of operation. The procedure for precisely determining GV should be described in a section of the OM related to procedures (e.g. Section 2.4 of the OM structure provided in A.3 of this annex). The use of landmarks or the use of a transmissometer is possible. The maximum ground visibility to be assumed is 5 km, analogue to the visibility according to the VFR rules in airspace G53. |
ALOS limit | For rotorcraft and multirotors:
For fixed-wing aircraft:
|
DLOS limit | The GV depends on the actual ground visibility at site and time of operation. However, the following always applies: |
If the largest possible distance between the remote pilot’s location and the outer side of the CV (boundary between CV and GRB) is greater than the VLOS distance, no VLOS operation may take place. UAS operations should then take place in BVLOS.
A.5.2.6 Examples for maximum VLOS distances
The following table is valid for a ground visibility of 5 km or more.
Characteristic dimension (CD) | Maximum VLOS distance | |
Rotary wing | Fixed wing | |
1 m | 347 m | 520 m |
2 m | 674 m | 1 010 m |
3 m | 1 000 m | 1 500 m |
3,5 m | 1 164,5 m | 1 500 m |
4 m | 1 328 m | 1 500 m |
4,53 m | 1 500 m | 1 500 m |
> 4,53 m | 1 500 m | 1 500 m |
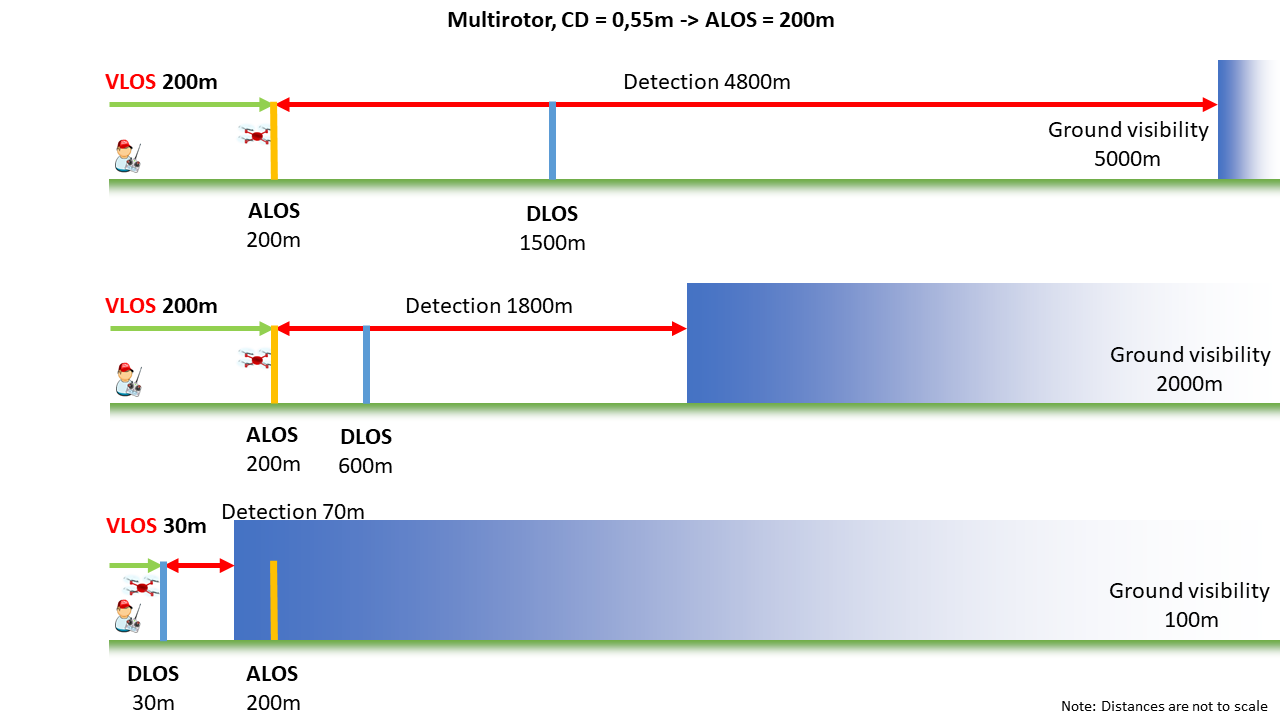
Figure 9 — Multirotor VLOS range
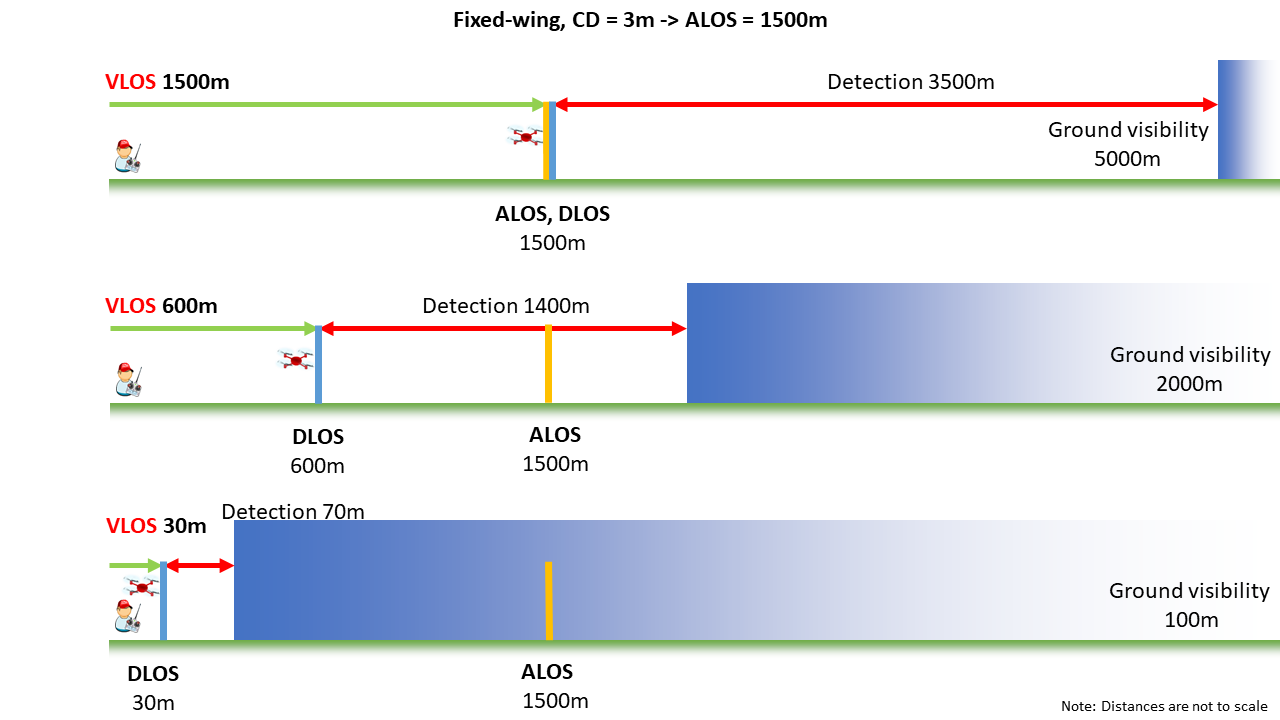
Figure 10 — Fixed-wing VLOS range