COMMISSION IMPLEMENTING REGULATION (EU) 2019/947
of 24 May 2019
on the rules and procedures for the operation of unmanned aircraft systems
Regulation (EU) 2019/947
THE EUROPEAN COMMISSION,
Having regard to the Treaty on the Functioning of the European Union,
Having regard to Regulation (EU) 2018/1139 of the European Parliament and of the Council of 4 July 2018 on common rules in the field of civil aviation and establishing a European Union Aviation Safety Agency, and amending Regulations (EC) No 2111/2005, (EC) No 1008/2008, (EU) No 996/2010, (EU) No 376/2014 and Directives 2014/30/EU and 2014/53/EU of the European Parliament and of the Council, and repealing Regulations (EC) No 216/2008 and (EC) No 552/2004 of the European Parliament and of the Council and Council Regulation (EEC) No 3922/914 OJ L 212, 22.8.2018, p. 1., and in particular Article 57 thereof,
Whereas:
(1) Unmanned aircraft, irrespective of their mass, can operate within the same Single European Sky airspace, alongside manned aircraft, whether airplanes or helicopters.
(2) As for manned aviation, a uniform implementation of and compliance with rules and procedures should apply to operators, including remote pilots, of unmanned aircraft and unmanned aircraft system (‘UAS’), as well as for the operations of such unmanned aircraft and unmanned aircraft system.
(3) Considering the specific characteristics of UAS operations, they should be as safe as those in manned aviation.
(4) Technologies for unmanned aircraft allow a wide range of possible operations. Requirements related to the airworthiness, the organisations, the persons involved in the operation of UAS and unmanned aircraft operations should be set out in order to ensure safety for people on the ground and other airspace users during the operations of unmanned aircraft.
(5) The rules and procedures applicable to UAS operations should be proportionate to the nature and risk of the operation or activity and adapted to the operational characteristics of the unmanned aircraft concerned and the characteristics of the area of operations, such as the population density, surface characteristics, and the presence of buildings.
(6) The risk level criteria as well as other criteria should be used to establish three categories of operations: the ‘open’, ‘specific’ and ‘certified’ categories.
(7) Proportionate risks mitigation requirements should be applicable to UAS operations according to the level of risk involved, the operational characteristics of the unmanned aircraft concerned and the characteristics of the area of operation.
(8) Operations in the ‘open’ category, which should cover operations that present the lowest risks, should not require UAS that are subject to standard aeronautical compliance procedures, but should be conducted using the UAS classes that are defined in Commission Delegated Regulation (EU) 2019/9455 Commission Delegated Regulation (EU) 2019/945 of 12 March 2019 on unmanned aircraft systems and on third-country operators of unmanned aircraft systems (see page 1 of this Official Journal)..
(9) Operations in the ‘specific’ category should cover other types of operations presenting a higher risk and for which a thorough risk assessment should be conducted to indicate which requirements are necessary to keep the operation safe.
(10) A system of declaration by an operator should facilitate the enforcement of this Regulation in case of low risk operations conducted in the ‘specific’ category for which a standard scenario has been defined with detailed mitigation measures.
(11) Operations in the ‘certified’ category should, as a principle, be subject to rules on certification of the operator, and the licensing of remote pilots, in addition to the certification of the aircraft pursuant to Delegated Regulation (EU) 2019/945.
(12) Whilst mandatory for the ‘certified category’, for the ‘specific’ category a certificate delivered by the competent authorities for the operation of an unmanned aircraft, as well as for the personnel, including remote pilots and organisations involved in those activities, or for the aircraft pursuant to Delegated Regulation (EU) 2019/945 could also be required.
(13) Rules and procedures should be established for the marking and identification of unmanned aircraft and for the registration of operators of unmanned aircraft or certified unmanned aircraft.
(14) Operators of unmanned aircraft should be registered where they operate an unmanned aircraft which, in case of impact, can transfer, to a human, a kinetic energy above 80 Joules or the operation of which presents risks to privacy, protection of personal data, security or the environment.
(15) Studies have demonstrated that unmanned aircraft with a take-off mass of 250 g or more would present risks to security and therefore UAS operators of such unmanned aircraft should be required to register themselves when operating such aircraft in the ‘open’ category.
(16) Considering the risks to privacy and protection of personal data, operators of unmanned aircraft should be registered if they operate an unmanned aircraft which is equipped with a sensor able to capture personal data. However, this should not be the case when the unmanned aircraft is considered to be a toy within the meaning of Directive 2009/48/EC of the European Parliament and of the Council on the safety of toys6 Directive 2009/48/EC of the European Parliament and of the Council of 18 June 2009 on the safety of toys (OJ L 170, 30.6.2009, p. 1)..
(17) The information about registration of certified unmanned aircraft and of operators of unmanned aircraft that are subject to a registration requirement should be stored in digital, harmonised, interoperable national registration systems, allowing competent authorities to access and exchange that information. The mechanisms to ensure the interoperability of the national registers in this Regulation should be without prejudice to the rules applicable to the future repository referred to in Article 74 of Regulation (EU) 2018/1139.
(18) In accordance with paragraph 8 of Article 56 of Regulation (EU) 2018/1139, this Regulation is without prejudice to the possibility for Member States to lay down national rules to make subject to certain conditions the operations of unmanned aircraft for reasons falling outside the scope of Regulation (EU) 2018/1139, including public security or protection of privacy and personal data in accordance with the Union law.
(19) National registration systems should comply with the applicable Union and national law on privacy and processing of personal data and the information stored in those registrations systems should be easily accessible7 Regulation (EU) 2016/679 of the European Parliament and of the Council of 27 April 2016 on the protection of natural persons with regard to the processing of personal data and on the free movement of such data, and repealing Directive 95/46/EC (General Data Protection Regulation) (OJ L 119, 4.5.2016, p. 1)..
(20) UAS operators and remote pilots should ensure that they are adequately informed about applicable Union and national rules relating to the intended operations, in particular with regard to safety, privacy, data protection, liability, insurance, security and environmental protection.
(21) Some areas, such as hospitals, gatherings of people, installations and facilities like penal institutions or industrial plants, top-level and higher-level government authorities, nature conservation areas or certain items of transport infrastructure, can be particularly sensitive to some or all types of UAS operations. This should be without prejudice to the possibility for Member States to lay down national rules to make subject to certain conditions the operations of unmanned aircraft for reasons falling outside the scope of this Regulation, including environmental protection, public security or protection of privacy and personal data in accordance with the Union law.
(22) Unmanned aircraft noise and emissions should be minimised as far as possible taking into account the operating conditions and various specific characteristics of individual Member States, such as the population density, where noise and emissions are of concern. In order to facilitate the societal acceptance of UAS operations, Delegated Regulation (EU) 2019/945 includes maximum level of noise for unmanned aircraft operated close to people in the ‘open’ category. In the ‘specific’ category there is a requirement for the operator to develop guidelines for its remote pilots so that all operations are flown in a manner that minimises nuisances to people and animals.
(23) Current national certificates should be adapted to certificates complying with the requirements of this Regulation.
(24) In order to ensure the proper implementation of this Regulation, appropriate transitional measures should be established. In particular, Member States and stakeholders should have sufficient time to adapt their procedures to the new regulatory framework before this Regulation applies.
(25) The new regulatory framework for UAS operations should be without prejudice to the applicable environmental and nature protection obligations otherwise stemming from national or Union law.
(26) While the ‘U-space’ system including the infrastructure, services and procedures to guarantee safe UAS operations and supporting their integration into the aviation system is in development, this Regulation should already include requirements for the implementation of three foundations of the U-space system, namely registration, geo-awareness and remote identification, which will need to be further completed.
(27) Since model aircraft are considered as UAS and given the good safety level demonstrated by model aircraft operations in clubs and associations, there should be a seamless transition from the different national systems to the new Union regulatory framework, so that model aircraft clubs and associations can continue to operate as they do today, as well as taking into account existing best practices in the Member States.
(28) In addition, considering the good level of safety achieved by aircraft of class C4 as provided in Annex to this Regulation, low risk operations of such aircraft should be allowed to be conducted in the ‘open’ category. Such aircraft, often used by model aircraft operators, are comparatively simpler than other classes of unmanned aircraft and should therefore not be subject to disproportionate technical requirements.
(29) The measures provided for in this Regulation are in accordance with the opinion of the committee established in accordance with Article 127 of Regulation (EU) 2018/1139,
HAS ADOPTED THIS REGULATION:
Regulation (EU) 2019/947
This Regulation lays down detailed provisions for the operation of unmanned aircraft systems as well as for personnel, including remote pilots and organisations involved in those operations.
ED Decision 2019/021/R
AREAS OF APPLICABILITY OF THE UAS REGULATION
For the purposes of the UAS Regulation, the term ‘operation of unmanned aircraft systems’ does not include indoor UAS operations. Indoor operations are operations that occur in or into a house or a building (dictionary definition) or, more generally, in or into a closed space such as a fuel tank, a silo, a cave or a mine where the likelihood of a UA escaping into the outside airspace is very low.
Regulation (EU) 2024/1110
For the purposes of this Regulation, the following definitions shall apply:
(1) ‘unmanned aircraft system’ (‘UAS’) means an unmanned aircraft, as defined in Article 3(30) of Regulation (EU) 2018/1139, and its control and monitoring unit;
(2) ‘unmanned aircraft system operator’ (‘UAS operator’) means any legal or natural person operating or intending to operate one or more UAS;
(3) ‘assemblies of people’ means gatherings where persons are unable to move away due to the density of the people present;
(4) ‘UAS geographical zone’ means a portion of airspace established by the competent authority that facilitates, restricts or excludes UAS operations in order to address risks pertaining to safety, privacy, protection of personal data, security or the environment, arising from UAS operations;
(5) ‘robustness’ means the property of mitigation measures resulting from combining the safety gain provided by the mitigation measures and the level of assurance and integrity that the safety gain has been achieved;
(6) ‘standard scenario’ means a type of UAS operation in the ‘specific’ category, as defined in Appendix 1 of the Annex, for which a precise list of mitigating measures has been identified in such a way that the competent authority can be satisfied with declarations in which operators declare that they will apply the mitigating measures when executing this type of operation;
(7) ‘visual line of sight operation’ (‘VLOS’) means a type of UAS operation in which, the remote pilot is able to maintain continuous unaided visual contact with the unmanned aircraft, allowing the remote pilot to control the flight path of the unmanned aircraft in relation to other aircraft, people and obstacles for the purpose of avoiding collisions;
(8) ‘beyond visual line of sight operation’ (‘BVLOS’) means a type of UAS operation which is not conducted in VLOS;
(9) ‘light UAS operator certificate’ (‘LUC’) means a certificate issued to a UAS operator by a competent authority as set out in part C of the Annex;
(10) ‘model aircraft club or association’ means an organisation legally established in a Member State for the purpose of conducting leisure flights, air displays, sporting activities or competition activities using UAS;
(11) ‘dangerous goods’ means articles or substances, which are capable of posing a hazard to health, safety, property or the environment in the case of an incident or accident, that the unmanned aircraft is carrying as its payload, including in particular:
(a) explosives (mass explosion hazard, blast projection hazard, minor blast hazard, major fire hazard, blasting agents, extremely insensitive explosives);
(b) gases (flammable gas, non-flammable gas, poisonous gas, oxygen, inhalation hazard);
(c) flammable liquids (flammable liquids; combustible, fuel oil, gasoline);
(d) flammable solids (flammable solids, spontaneously combustible solids, dangerous when wet);
(e) oxidising agents and organic peroxides;
(f) toxic and infectious substances (poison, biohazard);
(g) radioactive substances;
(h) corrosive substances;
(12) ‘payload’ means instrument, mechanism, equipment, part, apparatus, appurtenance, or accessory, including communications equipment, that is installed in or attached to the aircraft and is not used or intended to be used in operating or controlling an aircraft in flight, and is not part of an airframe, engine, or propeller;
(13) ‘direct remote identification’ means a system that ensures the local broadcast of information about a unmanned aircraft in operation, including the marking of the unmanned aircraft, so that this information can be obtained without physical access to the unmanned aircraft;
(14) ‘follow-me mode’ means a mode of operation of a UAS where the unmanned aircraft constantly follows the remote pilot within a predetermined radius;
(15) ‘geo-awareness’ means a function that, based on the data provided by Member States, detects a potential breach of airspace limitations and alerts the remote pilots so that they can take immediate and effective action to prevent that breach;
(16) ‘privately built UAS’ means a UAS assembled or manufactured for the builder’s own use, not including UAS assembled from sets of parts placed on the market as a single ready-to-assemble kit;
(17) ‘autonomous operation’ means an operation during which an unmanned aircraft operates without the remote pilot being able to intervene;
(18) ‘uninvolved persons’ means persons who are not participating in the UAS operation or who are not aware of the instructions and safety precautions given by the UAS operator;
(19) ‘making available on the market’ means any supply of a product for distribution, consumption or use on the Union market in the course of a commercial activity, whether in exchange of payment or free of charge;
(20) ‘placing on the market’ means the first making available of a product on the Union market;
(21) ‘controlled ground area’ means the ground area where the UAS is operated and within which the UAS operator can ensure that only involved persons are present;
(22) ‘maximum take-off mass’ (‘MTOM’) means the maximum Unmanned Aircraft mass, including payload and fuel, as defined by the manufacturer or the builder, at which the Unmanned Aircraft can be operated;
(23) ‘unmanned sailplane’ means an unmanned aircraft that is supported in flight by the dynamic reaction of the air against its fixed lifting surfaces, the free flight of which does not depend on an engine. It may be equipped with an engine to be used in case of emergency.
(24) ‘unmanned aircraft observer’ means a person, positioned alongside the remote pilot, who, by unaided visual observation of the unmanned aircraft, assists the remote pilot in keeping the unmanned aircraft in VLOS and safely conducting the flight;
(25) ‘airspace observer’ means a person who assists the remote pilot by performing unaided visual scanning of the airspace in which the unmanned aircraft is operating for any potential hazard in the air;
(26) ‘control and monitoring unit (CMU)’ means the equipment to control and monitor unmanned aircraft remotely as defined in point (32) of Article 3 of Regulation (EU) 2018/1139;
(27) ‘C2 link’ means the data link between the UA and the CMU for the purpose of managing the flight;
(28) ‘flight geography’ means the volume(s) of airspace defined spatially and temporally in which the UAS operator plans to conduct the operation under normal procedures described in point (6)(c) of Appendix 5 to the Annex;
(29) ‘flight geography area’ means the projection of the flight geography on the surface of the earth;
(30) ‘contingency volume’ means the volume of airspace outside the flight geography where contingency procedures described in point (6)(d) of Appendix 5 to the Annex are applied;
(31) ‘contingency area’ means the projection of the contingency volume on the surface of the earth;
(32) ‘operational volume’ is the combination of the flight geography and the contingency volume;
(33) ‘ground risk buffer’ is an area over the surface of the earth, which surrounds the operational volume and that is specified in order to minimise the risk to third parties on the surface in the event of the unmanned aircraft leaving the operational volume.
(34) ‘night’ means the hours between the end of evening civil twilight and the beginning of morning civil twilight as defined in Implementing Regulation (EU) No 923/2012 8 Commission Implementing Regulation (EU) No 923/2012 of 26 September 2012 laying down the common rules of the air and operational provisions regarding services and procedures in air navigation and amending Implementing Regulation (EU) No 1035/2011 and Regulations (EC) No 1265/2007, (EC) No 1794/2006, (EC) No 730/2006, (EC) No 1033/2006 and (EU) No 255/2010, (OJ L 281, 13.10.2012, p.1)..
(35) ‘UAS component’ means any engine, propeller or part of the UA, or any element of the control and monitoring unit (CMU).
ED Decision 2019/021/R
DEFINITION OF ‘ASSEMBLIES OF PEOPLE’
Assemblies of people have been defined by an objective criterion related to the possibility for an individual to move around in order to limit the consequences of an out-of-control UA. It was indeed difficult to propose a number of people above which this group of people would turn into an assembly of people: numbers were indeed proposed, but they showed quite a large variation. Qualitative examples of assemblies of people are:
(a) sport, cultural, religious or political events;
(b) beaches or parks on a sunny day;
(c) commercial streets during the opening hours of the shops; and
(d) ski resorts/tracks/lanes.
DEFINITION OF ‘DANGEROUS GOODS’
‘Dangerous goods’ should be considered any articles or substances which are capable of posing a hazard to health, safety, property or the environment, and which are listed as dangerous goods in the ICAO Technical Instructions for the Safe Transport of Dangerous Goods by Air (ICAO Doc 9284), known as the ‘Technical Instructions’, or which are classified as such according to the Technical Instructions.
ED Decision 2022/002/R
DEFINITION OF ‘DANGEROUS GOODS’
The definition of ‘dangerous goods’ in Article 2(11) of the UAS Regulation stems from the definition and classification of ‘dangerous goods’ in the ICAO Technical Instructions. ICAO Advisory Circular (AC) 102-37, Revision 0, issued on 23 June 2020, contains further information.
Under the definition of ‘dangerous goods’ in Article 2(11), blood is considered capable of posing a hazard to health when it contains or may contain infectious substances.
‘Infectious substances’ means substances that are classified under Division 6.2 of the Technical Instructions. The definition and classification of such substances are also available in the above‑mentioned ICAO AC 102-37.
Blood for transfusion and medical samples that are not subject to the provisions of the Technical Instructions may be transported in the ‘open’, ‘specific’, or ‘certified’ categories.
Blood that contains or potentially contains infectious substances should be transported in the ‘specific’ or ‘certified’ categories. If such transport results in a high risk for third parties in case of an accident, the UAS operation falls under the ‘certified’ category (as per Article 6(1)(b)(iii) of the UAS Regulation). If the blood contains or potentially contains infectious substances and is enclosed in such a container such that the blood will not be spilled in case of an accident, the UAS operation may fall under the ‘specific’ category if there are no other causes of high risk for third parties.
Articles and substances which would otherwise be classified as dangerous goods (e.g. fuel, batteries and other goods used during the flight to supply energy to the drone’s system) but which are required to be on board the aircraft for the propulsion of the UAS or for the operation of its specialised equipment during transport, or which are required in accordance with the pertinent operating requirements should not be considered as transported dangerous goods and their safety should verified during the design verification of the UAS.
ED Decision 2022/002/R
DEFINITION OF ‘PRIVATELY BUILT UAS’
A UAS is considered privately built when it is manufactured or assembled by the operator for their own use and not placed on the market (i.e. there is no offer or agreement (written or verbal) for the transfer of its ownership or any other property right). In the context of this definition, the terms ‘assembled’ or ‘manufactured’ by the operator concerns one of the following actions:
(a) the complete manufacturing of the UAS, or at least the most of it;
(b) the assembly of the UAS from parts or sub-assemblies sold separately;
(c) the modification of a class C4 UAS (aeromodel).
A change of one or a few components of a UAS bearing a class identification label (apart from a C4 UAS) does not qualify it as a privately built UAS, unless the change is described in the manufacturer’s instructions. For more information, please refer to AMC1 UAS.OPEN.020(5)(c) and (d), UAS.OPEN.030(3) and UAS.OPEN.040(4)(c), (d) and (e).
A UAS assembled from the elements provided in a ‘ready-to-assemble kit’ is also not considered ‘privately built’.
ED Decision 2019/021/R
DEFINITION OF ‘AUTONOMOUS OPERATION’
Flight phases during which the remote pilot has no ability to intervene in the course of the aircraft, either following the implementation of emergency procedures, or due to a loss of the command-and-control connection, are not considered autonomous operations.
An autonomous operation should not be confused with an automatic operation, which refers to an operation following pre-programmed instructions that the UAS executes while the remote pilot is able to intervene at any time.
DEFINITION OF ‘UNINVOLVED PERSONS’
Due to the huge variety of possible circumstances, this GM only provides general guidelines.
An uninvolved person is a person that does not take part in the UAS operation, either directly or indirectly, and that could be potentially affected by the UAS operation. Persons protected by a shelter (e.g. a roof) are not considered to be affected by the UAS operation nor exposed to direct risks if the MTOM of the UA is below 25 kg or if the UA complies with the conditions defined in criterion #2 of mitigation M1 of the SORA (refer to point B.2 of Annex B to the SORA).
People that sit at a beach or in a park, or walk on a street or on a road, are also generally considered uninvolved persons.
A person may be considered to be ‘involved’ in the UAS operation when the following conditions are met.
Before the flight, the person:
(a) has given explicit consent (it may be verbal) to the UAS operator or to the remote pilot to be part of the UAS operation (even indirectly as a spectator or just accepting to be overflown by the UAS); and
(b) has received from the UAS operator or from the remote pilot clear instructions and safety precautions to follow in case the UAS exhibits any unplanned behaviour.
UAS operators are responsible for ensuring that all persons involved are able to follow in a timely manner the emergency procedures.
In principle, in order to be considered a ‘person involved’, one:
(a) is able to decide whether or not to participate in the UAS operation;
(b) broadly understands the risks involved;
(c) has reasonable safeguards during the UAS operations, introduced by the site manager and the aircraft operator; and
(d) is not restricted from taking part in the event or activity if they decide not to participate in the UAS operation.
The person involved is expected to follow the directions and safety precautions provided by the UAS operator or the remote pilot, and the UAS operator or the remote pilot should check by asking simple questions to make sure that the directions and safety precautions have been properly understood.
It should be reminded that UAS operations over assemblies of people (e.g. sport activities or other mass public events) are never allowed in the ‘open’ category. These operations may be classified as falling into the ‘specific’ or ‘certified’ category, depending on the risk involved. Spectators or any other people gathered for sport activities or other mass public events for which the UAS operation is not the primary focus are generally considered ‘uninvolved persons’.
An example: when filming with a UAS at a large music festival or public event, it is not sufficient to inform the audience or anyone present via a public address system, or via a statement on the ticket, or in advance by email or text message. Those types of communication channels do not satisfy the points above. In order to be considered a person involved, each person should be asked for their permission and be made aware of the possible risk(s).
ED Decision 2022/002/R
DEFINITION OF ‘CONTROLLED GROUND AREA’
‘Controlled ground area’ is an area on the ground (on the surface of the Earth) where the UAS operator is able to ensure that only the persons involved are present. Such area comprises the ‘flight geography area’, the ‘contingency area’ and the ‘ground risk buffer’. The UAS operator may protect the controlled ground area by means of fencing or using other methods, as appropriate, considering the population density.
DEFINITION OF ‘MAXIMUM TAKE-OFF MASS (MTOM)’
This MTOM is the maximum mass defined by the manufacturer or the builder, in the case of privately built UAS, which ensures the controllability and mechanical resistance of the UA when flying within the operational limits.
The MTOM should include all the elements on board the UA:
(a) all the structural elements of the UA;
(b) the motors;
(c) the propellers, if installed;
(d) all the electronic equipment and antennas;
(e) the batteries and the maximum capacity of fuel, oil and all fluids; and
(f) the heaviest payload allowed by the manufacturer, including sensors and their ancillary equipment.
ED Decision 2022/002/R
RESPONSIBILITIES OF THE AIRSPACE OBSERVER (AO)
The employment of AOs is not limited to operations covered by STSs — they can be employed also in other operations under the ‘specific’ category. The AO’s main responsibilities, as defined in point UAS.STS-02.050, are to:
(1) maintain a thorough visual scan of the airspace surrounding the unmanned aircraft (UA) in order to identify any risk of collision with any manned aircraft;
(2) maintain awareness of the position of the UA through visual contact or through assistance provided by electronic means;
(3) alert the remote pilot when a hazard is detected and assist in avoiding or minimising the potential negative effects.
GM1 Article 2(28), (29), (30), (31), (32) and (33) Definitions
ED Decision 2022/002/R
DEFINITIONS OF ‘FLIGHT GEOGRAPHY’, ‘FLIGHT GEOGRAPHY AREA’, ‘CONTINGENCY VOLUME’, ‘CONTINGENCY AREA’, ‘OPERATIONAL VOLUME’ AND ‘GROUND RISK BUFFER’
The ‘flight geography’ is the spatially and temporally defined volume of airspace in which the UAS operator plans to conduct the operation under normal procedures; the projection of such volume on the surface of the Earth constitutes the ‘flight geography area’. Additionally, the UA positioning errors must be accounted for in the definition of this area.
To cope with abnormal situations (e.g. navigation errors, UA drifting due to wind/gusts, etc.), the UAS operator should define the ‘contingency volume’ as an airspace volume where contingency procedures are applied in order to bring the UA back to a normal situation within the ‘flight geography’ (for example, if the UA exits the boundaries of the flight geography, the remote pilot should take actions to pilot the UAS back into the flight geography. If the contingency situation persists, the remote pilot should activate the FTS (if available) before the UAS exits the contingency volume). The projection of the contingency volume on the surface of the Earth is the ‘contingency area’.
The ‘operational volume’ includes the ‘flight geography’ and the ‘contingency volume’. To define the operational volume, the UAS operator should consider the position-keeping capabilities of the UAS in a 4D space (latitude, longitude, height, and time).
The accuracy of the navigation solution, the flight technical error of the UAS, as well as the path definition error (e.g. map error) and latencies should be considered and addressed in defining the operational volume. For navigation errors: the UAS operator should take into account that such errors are determined by the interaction of several contributes, like positioning sensors providing position, navigation and flight control systems, system and human latencies, and environment.
The UAS operator should, therefore, establish sufficient margins to cater for such errors.
The ‘ground risk buffer’ is the area on the surface of the Earth surrounding the operational volume, which is defined by the UAS operator to minimise the risk to third parties on the surface in case the UA leaves the operational volume (i.e. the area the UA is expected to impact if its FTS is triggered when the UA leaves the operational volume). Point 2.3.1(c)(3) of AMC1 to Article 11 (SORA) provides additional information.
The relation between ‘flight geography’, ‘flight geography area’, ‘contingency area’, ‘operational volume’ and ‘ground risk buffer’ are depicted in Figure 1 below:
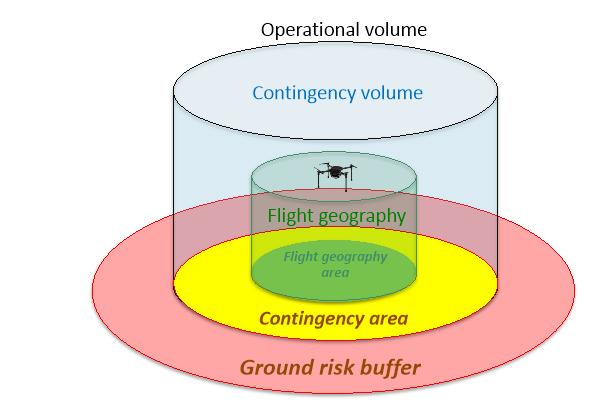
Figure 1 — Relation between ‘flight geography’, ‘flight geography area’, ‘contingency area’, ‘operational volume’ and ‘ground risk buffer’
Article 3 - Categories of UAS operations
Regulation (EU) 2019/947
UAS operations shall be performed in the ‘open’, ‘specific’ or ‘certified’ category defined respectively in Articles 4, 5 and 6, subject to the following conditions:
(a) UAS operations in the ‘open’ category shall not be subject to any prior operational authorisation, nor to an operational declaration by the UAS operator before the operation takes place;
(b) UAS operations in the ‘specific’ category shall require an operational authorisation issued by the competent authority pursuant to Article 12 or an authorisation received in accordance with Article 16, or, under circumstances defined in Article 5(5), a declaration to be made by a UAS operator;
(c) UAS operations in the ‘certified’ category shall require the certification of the UAS pursuant to Delegated Regulation (EU) 2019/945 and the certification of the operator and, where applicable, the licensing of the remote pilot.
BOUNDARIES BETWEEN THE CATEGORIES OF UAS OPERATIONS
(a) Boundary between ‘open’ and ‘specific’
A UAS operation does not belong to the ‘open’ category when at least one of the general criteria listed in Article 4 of the UAS Regulation is not met (e.g. when operating beyond visual line of sight (BVLOS)) or when the detailed criteria for a subcategory are not met (e.g. operating a 10 kg UA close to people when subcategory A2 is limited to 4 kg UA).
(b) Boundary between ‘specific’ and ‘certified’
Article 6 of the UAS Regulation and Article 40 of Regulation (EU) 2019/945 define the boundary between the ‘specific’ and the ‘certified’ category. The first article defines the boundary from an operational perspective, while the second one defines the technical characteristics of the UA, and they should be read together.
A UAS operation belongs to the ‘certified’ category when, based on the risk assessment, the competent authority considers that the risk cannot be mitigated adequately without the:
— certification of the airworthiness of the UAS;
— certification of the UAS operator; and
— licensing of the remote pilot, unless the UAS is fully autonomous.
UAS operations are always considered to be in the ‘certified’ category when they:
— are conducted over assemblies of people with a UA that has characteristic dimensions of 3 m or more; or
— involve the transport of people; or
— involve the carriage of dangerous goods that may result in a high risk for third parties in the event of an accident.
Article 4 - ‘Open’ category of UAS operations
Regulation (EU) 2019/947
1. Operations shall be classified as UAS operations in the ‘open’ category only where the following requirements are met:
(a) the UAS belongs to one of the classes set out in Delegated Regulation (EU) 2019/945 or is privately built or meets the conditions defined in Article 20;
(b) the unmanned aircraft has a maximum take-off mass of less than 25 kg;
(c) the remote pilot ensures that the unmanned aircraft is kept at a safe distance from people and that it is not flown over assemblies of people;
(d) the remote pilot keeps the unmanned aircraft in VLOS at all times except when flying in follow-me mode or when using an unmanned aircraft observer as specified in Part A of the Annex;
(e) during flight, the unmanned aircraft is maintained within 120 metres from the closest point of the surface of the earth, except when overflying an obstacle, as specified in Part A of the Annex
(f) during flight, the unmanned aircraft does not carry dangerous goods and does not drop any material;
2. UAS operations in the ‘open’ category shall be divided in three sub-categories in accordance with the requirements set out in Part A of the Annex.
Article 5 - ‘Specific’ category of UAS operations
Commission Implementing Regulation (EU) 2021/1166
1. Where one of the requirements laid down in Article 4 or in Part A of the Annex is not met, a UAS operator shall be required to obtain an operational authorisation pursuant to Article 12 from the competent authority in the Member State where it is registered.
2. When applying to a competent authority for an operational authorisation pursuant Article 12, the operator shall perform a risk assessment in accordance with Article 11 and submit it together with the application, including adequate mitigating measures.
3. In accordance with point UAS.SPEC.040 laid down in Part B of the Annex, the competent authority shall issue an operational authorisation, if it considers that the operational risks are adequately mitigated in accordance with Article 12.
4. The competent authority shall specify whether the operational authorisation concerns:
(a) the approval of a single operation or a number of operations specified in time or location(s) or both. The operational authorisation shall include the associated precise list of mitigating measures;
(b) the approval of an LUC, in accordance with part C of the Annex.
5. Where the UAS operator submits a declaration to the competent authority of the Member State of registration in accordance with point UAS.SPEC.020 laid down in Part B of the Annex for an operation complying with a standard scenario set out in Appendix 1 to that Annex, the UAS operator shall not be required to obtain an operational authorisation in accordance with paragraphs 1 to 4 of this Article and the procedure laid down in paragraph 5 of Article 12 shall apply. The UAS operator shall use the declaration referred to in Appendix 2 to that Annex.
6. An operational authorisation or a declaration shall not be required for:
(a) UAS operators holding an LUC with appropriate privileges in accordance with point UAS.LUC.060 of the Annex;
(b) operations conducted in the framework of model aircraft clubs and associations that have received an authorisation in accordance with Article 16.
AMC1 Article 5 ‘Specific’ category of UAS operations
ED Decision 2022/002/R
TRANSPORT OF DANGEROUS GOODS IN THE ‘SPECIFIC’ CATEGORY
(a) Dangerous goods may be transported in the ‘specific’ category of UAS operations only if the UAS operator is able to demonstrate that these goods will not cause harm or damage to third parties or to the environment in case of accident. When compatible with the operation, a crash‑protected container, which will prevent the leakage/dispersion of dangerous goods in case of accident, would be acceptable. In this case, the UAS operator should demonstrate that the container is capable of maintaining/protecting the dangerous goods without causing damage or harm to third parties or the environment in case of accident. In demonstrating the conformity of the container, the operational characteristics of the flight (flight speed, altitude, weather conditions, etc.) shall be taken into account, as well as the defining aspects of the geographical area of operation.
(b) The assessment of the operational risk of transporting dangerous goods should take into account the following:
(1) the risk that such goods pose to persons that are directly involved in their handling, to the environment, and to third parties and their properties;
(2) the hazard posed by the quantity and class of the dangerous goods;
(3) the characteristics of the container for the dangerous goods;
(4) the level of competence of those handling the dangerous goods; and
(5) the geographical area in which the flight will be operated.
(c) The UAS operator that wishes to carry out operations in the ‘specific’ category to transport dangerous goods should establish a dangerous goods training programmes for the personnel involved, as required by the Technical Instructions. Such training programmes should be commensurate with the responsibilities of the personnel involved in those operations. The training programmes should be subject to review and approval by the competent authority, and should cover at least the following aspects:
(1) dangerous goods terminology;
(2) classification of dangerous goods;
(3) labelling of dangerous goods;
(4) identification of dangerous goods that use ‘SDSs’ and the Globally Harmonised System of Classification and Labelling of Chemicals (GHS) consumer labelling;
(5) use of the dangerous goods list provided in the Technical Instructions;
(6) storage and handling of dangerous goods, including but not limited to the segregation of incompatible dangerous goods, dangerous goods loading, and dangerous goods securing;
(7) instructions and safety precautions to be provided to employees and third parties; and
(8) emergency/reporting procedures included in the ERP in case of an accident/incident with dangerous goods.
Article 6 - ‘Certified’ category of UAS operations
Regulation (EU) 2019/947
1. Operations shall be classified as UAS operations in the ‘certified’ category only where the following requirements are met:
(a) the UAS is certified pursuant to points (a), (b) and (c) of paragraph 1 of Article 40 of Delegated Regulation (EU) 2019/945; and
(b) the operation is conducted in any of the following conditions:
i. over assemblies of people;
ii. involves the transport of people;
iii. involves the carriage of dangerous goods, that may result in high risk for third parties in case of accident.
2. In addition, UAS operations shall be classified as UAS operations in the ‘certified’ category where the competent authority, based on the risk assessment provided for in Article 11, considers that the risk of the operation cannot be adequately mitigated without the certification of the UAS and of the UAS operator and, where applicable, without the licensing of the remote pilot.
UAS OPERATIONS IN THE ‘CERTIFIED’ CATEGORY
Article 6 of the UAS Regulation should be read together with Article 40 of Regulation (EU) 2019/945 — Article 6 addresses UAS operations and Article 40 addresses the UAS. This construction was necessary to respect the EU legal order reflected in Regulation (EU) 2018/1139, which foresees that the requirements for UAS operations and registration are in the implementing act, and that the technical requirements for UAS are in the delegated act. The reading of the two articles results in the following:
(a) the transport of people is always in the ‘certified’ category. Indeed, the UAS must be certified in accordance with Article 40 and the transport of people is one of the UAS operations identified in Article 6 as being in the ‘certified’ category;
(b) flying over assemblies of people with a UAS that has a characteristic dimension of less than 3 m may be in the ‘specific’ category unless the risk assessment concludes that it is in the ‘certified’ category; and
(c) the transport of dangerous goods is in the ‘certified’ category if the payload is not in a crash‑protected container, such that there is a high risk for third parties in the case of an accident.
Article 7 - Rules and procedures for the operation of UAS
Regulation (EU) 2024/1110
1. UAS operations in the ‘open’ category shall comply with the operational limitations set out in Part A of the Annex.
2. UAS operations in the ‘specific’ category shall comply with the operational limitations set out in the operational authorisation as referred to in Article 12 or the authorisation as referred to in Article 16, or in a standard scenario defined in Appendix 1 to the Annex as declared by the UAS operator.
This paragraph shall not apply where the UAS operator holds an LUC with appropriate privileges.
UAS operations in the ‘specific’ category shall be subject to the applicable operational requirements laid down in Commission Implementing Regulation (EU) No 923/20129 Commission Implementing Regulation (EU) No 923/2012 of 26 September 2012 laying down the common rules of the air and operational provisions regarding services and procedures in air navigation and amending Implementing Regulation (EU) No 1035/2011 and Regulations (EC) No 1265/2007, (EC) No 1794/2006, (EC) No 730/2006, (EC) No 1033/2006 and (EU) No 255/2010 (OJ L 281, 13.10.2012, p. 1)..
2a. The operator of a UAS that meets the conditions specified in point 1(d) of Article 40 of Delegated Regulation (EU) 2019/945 shall obtain the following certificates:
(i) a certificate of airworthiness or a restricted certificate of airworthiness issued in accordance with Subpart H of Annex I (Part 21) to Commission Regulation (EU) No 748/201210 Commission Regulation (EU) No 748/2012 of 3 August 2012 laying down implementing rules for the airworthiness and environmental certification of aircraft and related products, parts and appliances, as well as for the certification of design and production organisations (recast) (OJ L 224, 21.8.2012, p. 1, ELI: http://data.europa.eu/eli/reg/2012/748/oj);
(ii) a noise certificate issued in accordance with Subpart I of Annex I (Part 21) to Commission Regulation (EU) No 748/2012 when the UA is subject to the environmental protection requirements laid down in point 21.B.85 of Regulation (EU) No 748/2012.
3. UAS operations in the ‘certified’ category shall be subject to the applicable operational requirements laid down in Implementing Regulation (EU) No 923/2012 and Commission Regulations (EU) No 965/201211 Commission Regulation (EU) No 965/2012 of 5 October 2012 laying down technical requirements and administrative procedures related to air operations pursuant to Regulation (EC) No 216/2008 of the European Parliament and of the Council (OJ L 296, 25.10.2012, p. 1). and (EU) No 1332/201112 Commission Regulation (EU) No 1332/2011 of 16 December 2011 laying down common airspace usage requirements and operating procedures for airborne collision avoidance (OJ L 336, 20.12.2011, p. 20)..
Article 8 - Rules and procedures for the competency of remote pilots
Regulation (EU) 2019/947
1. Remote pilots operating UAS in the ‘open’ category shall comply with the competency requirements set in Part A of the Annex.
2. Remote pilots operating UAS in the ‘specific’ category shall comply with the competency requirements set out in the operational authorisation by the competent authority or in the standard scenario defined in Appendix 1 to the Annex or as defined by the LUC and shall have at least the following competencies:
(a) ability to apply operational procedures (normal, contingency and emergency procedures, flight planning, pre-flight and post-flight inspections);
(b) ability to manage aeronautical communication;
(c) manage the unmanned aircraft flight path and automation;
(d) leadership, teamwork and self-management;
(e) problem solving and decision-making;
(f) situational awareness;
(g) workload management;
(h) coordination or handover, as applicable.
3. Remote pilots operating in the framework of model aircraft clubs or associations shall comply with the minimum competency requirements defined in the authorisation granted in accordance with Article 16.
Article 9 - Minimum age for remote pilots
Regulation (EU) 2019/947
1. The minimum age for remote pilots operating a UAS in the ‘open’ and ‘specific’ category shall be 16 years.
2. No minimum age for remote pilots shall be required:
(a) when they operate in subcategory A1 as specified in Part A of the Annex to this Regulation, with a UAS Class C0 defined in Part 1 of the Annex to Delegated Regulation (EU) 2019/945 that is a toy within the meaning of Directive 2009/48/EC;
(b) for privately-built UAS with a maximum take-off mass of less than 250g;
(c) when they operate under the direct supervision of a remote pilot complying with paragraph 1 and Article 8.
3. Member States may lower the minimum age following a risk-based approach taking into account specific risks associated with the operations in their territory:
(a) for remote pilots operating in the ‘open’ category by up to 4 years;
(b) for remote pilots operating in the ‘specific’ category by up to 2 years.
4. Where a Member State lowers the minimum age for remote pilots, those remote pilots shall only be allowed to operate a UAS on the territory of that Member State.
5. Member States may define a different minimum age for remote pilots operating in the framework of model aircraft clubs or associations in the authorisation issued in accordance with Article 16.
GM1 Article 9 Minimum age for remote pilots
ED Decision 2019/021/R
SUPERVISOR
A person may act as a remote pilot even if he or she has not reached the minimum age defined in Article 9(1) of the UAS Regulation, provided that the person is supervised. The supervising remote pilot must, in any case, comply with the age requirement specified in that Article. The possibility to lower the minimum age applies only to remote pilots (and not to supervisors). Since the supervisor and the young remote pilot must both demonstrate competency to act as a remote pilot, no minimum age is defined to conduct the training and pass the test to demonstrate the minimum competency to act as a remote pilot in the ‘open’ category.
Article 10 - Rules and procedures for the airworthiness of UAS
Regulation (EU) 2019/947
Unless privately-built, or used for operations referred to in Article 16, or meeting the conditions defined in Article 20, UAS used in operations set out in this Regulation shall comply with the technical requirements and rules and procedures for the airworthiness defined in the delegated acts adopted pursuant to Article 58 of Regulation (EU) 2018/1139.
Article 11 - Rules for conducting an operational risk assessment
Regulation (EU) 2019/947
1. An operational risk assessment shall:
(a) describe the characteristics of the UAS operation;
(b) propose adequate operational safety objectives;
(c) identify the risks of the operation on the ground and in the air considering all of the below:
i. the extent to which third parties or property on the ground could be endangered by the activity;
ii. the complexity, performance and operational characteristics of the unmanned aircraft involved;
iii. the purpose of the flight, the type of UAS, the probability of collision with other aircraft and class of airspace used;
iv. the type, scale, and complexity of the UAS operation or activity, including, where relevant, the size and type of the traffic handled by the responsible organisation or person;
v. the extent to which the persons affected by the risks involved in the UAS operation are able to assess and exercise control over those risks.
(d) identify a range of possible risk mitigating measures;
(e) determine the necessary level of robustness of the selected mitigating measures in such a way that the operation can be conducted safely.
2. The description of the UAS operation shall include at least the following:
(a) the nature of the activities performed;
(b) the operational environment and geographical area for the intended operation, in particular overflown population, orography, types of airspace, airspace volume where the operation will take place and which airspace volume is kept as necessary risk buffers, including the operational requirements for geographical zones;
(c) the complexity of the operation, in particular which planning and execution, personnel competencies, experience and composition, required technical means are planned to conduct the operation;
(d) the technical features of the UAS, including its performance in view of the conditions of the planned operation and, where applicable, its registration number;
(e) the competence of the personnel for conducting the operation including their composition, role, responsibilities, training and recent experience.
3. The assessment shall propose a target level of safety, which shall be equivalent to the safety level in manned aviation, in view of the specific characteristics of UAS operation.
4. The identification of the risks shall include the determination of all of the below:
(a) the unmitigated ground risk of the operation taking into account the type of operation and the conditions under which the operation takes place, including at least the following criteria:
i. VLOS or BVLOS;
ii. population density of the overflown areas;
iii. flying over an assembly of people;
iv. the dimension characteristics of the unmanned aircraft;
(b) the unmitigated air risk of the operation taking into account all of the below:
i. the exact airspace volume where the operation will take place, extended by a volume of airspace necessary for contingency procedures;
ii. the class of the airspace;
iii. the impact on other air traffic and air traffic management (ATM) and in particular:
— the altitude of the operation;
— controlled versus uncontrolled airspace;
— aerodrome versus non-aerodrome environment;
— airspace over urban versus rural environment;
— separation from other traffic.
5. The identification of the possible mitigation measures necessary to meet the proposed target level of safety shall consider the following possibilities:
(a) containment measures for people on the ground;
(b) strategic operational limitations to the UAS operation, in particular:
i. restricting the geographical volumes where the operation takes place;
ii. restricting the duration or schedule of the time slot in which the operation takes place;
(c) strategic mitigation by common flight rules or common airspace structure and services;
(d) capability to cope with possible adverse operating conditions;
(e) organisation factors such as operational and maintenance procedures elaborated by the UAS operator and maintenance procedures compliant with the manufacturer’s user manual;
(f) the level of competency and expertise of the personnel involved in the safety of the flight;
(g) the risk of human error in the application of the operational procedures;
(h) the design features and performance of the UAS in particular:
i. the availability of means to mitigate risks of collision;
ii. the availability of systems limiting the energy at impact or the frangibility of the unmanned aircraft;
iii. the design of the UAS to recognised standards and the fail-safe design.
6. The robustness of the proposed mitigating measures shall be assessed in order to determine whether they are commensurate with the safety objectives and risks of the intended operation, particularly to make sure that every stage of the operation is safe.
GM1 AMC1 Article 11 Rules for conducting an operational risk assessment
ED Decision 2023/012/R
GENERAL
The operational risk assessment required by Article 11 of the UAS Regulation may be conducted using the methodology described in AMC1 Article 11. This methodology is basically the specific operations risk assessment (SORA) developed by JARUS. Other methodologies might be used by the UAS operator as alternative means of compliance.
Unmanned free balloons are unmanned aircraft and shall thus comply with Regulation (EU) 2019/947. For this type of aircraft, compliance with Appendix 2 to Regulation (EU) No 923/2012 is considered an acceptable means of compliance with Article 11.
Aspects other than safety, such as security, privacy, environmental protection, the use of the radio frequency (RF) spectrum, etc., should be assessed in accordance with the applicable requirements established by the Member State in which the operation is intended to take place, or by other EU regulations.
For some UAS operations that are classified as being in the ‘specific’ category, alternatives to carrying out a full risk assessment are offered to UAS operators:
(a) for UAS operations with lower intrinsic risks, a declaration may be submitted when the operations comply with the standard scenarios (STSs) listed in Appendix 1 to the UAS Regulation. Table 1 provides a summary of the STSs; and
(b) for other UAS operations, a request for authorisation may be submitted based on the mitigations and provisions described in the predefined risk assessment (PDRA) when the UAS operation meets the operational characterisation described in AMC2 et seq. Article 11 to the UAS Regulation. Table 2 below provides a summary of the PDRAs that have been published so far.
While the STSs are described in a detailed way, the provisions and mitigations in the PDRAs are described in a rather generic way to provide flexibility to UAS operators and the competent authorities to establish more prescriptive limitations and provisions that are adapted to the particularities of the intended operations. Two types of PDRAs are provided:
— those derived from an STS, which allow the UAS operator to conduct similar operations, but using, for example, UAS without the class label that is mandated by the STS (e.g. privately built UAS); and
— more generic PDRAs.
The codification of a PDRA includes the letter ‘G’ or ‘S’ (e.g. PDRA-G01 or PDRA-S01):
— ‘G’ is used for generic PDRAs.
— ‘S’ is used for PDRAs that are derived from an STS whose level of prescriptiveness is the same as of the corresponding STS. Therefore, those PDRAs, although they address UAS operations that are subject to operational authorisations (to allow the use of UAS without a class label), are expected to provide an even more simplified authorisation process compared to other (non-STS-related) PDRAs. Ideally, for UAS operations that are performed based on those PDRAs, the competent authorities may implement expedited operational-authorisation processes. Those processes may be based on the review of the documentation that is submitted by the UAS operator to support the declaration of compliance with the PDRA provisions.
In accordance with Article 11 of the UAS Regulation, the applicant must collect and provide the relevant technical, operational and system information needed to assess the risk associated with the intended operation of the UAS, and the SORA (AMC1 Article 11 of the UAS Regulation) provides a detailed framework for such data collection and presentation. The concept of operations (ConOps) description is the foundation for all other activities, and should be as accurate and detailed as possible. The ConOps should not only describe the operation, but also provide insight into the UAS operator’s operational safety culture. It should also include how and when to interact with the air navigation service provider (ANSP) when applicable.
PDRAs only address safety risks; consequently, additional limitations and provisions might need to be included after the consideration of other risks (e.g. security, privacy, etc.).
|
STS# |
Edition/date |
UAS characteristics |
BVLOS/VLOS |
Overflown area |
Maximum range from remote pilot |
Maximum height |
Airspace |
Notes |
|
STS-01 |
June 2020 |
Bearing a C5 class marking (maximum characteristic dimension of up to 3 m and MTOM of up to 25 kg) |
VLOS |
Controlled ground area that might be located in a populated area |
VLOS |
120 m |
Controlled or uncontrolled, with low risk of encounter with manned aircraft |
|
|
STS-02 |
June 2020 |
Bearing a C6 class marking (maximum characteristic dimension of up to 3 m and MTOM of up to 25 kg) |
BVLOS |
Controlled ground area that is entirely located in a sparsely populated area |
2 km with an AO 1 km, if no AO |
120 m |
Controlled or uncontrolled, with low risk of encounter with manned aircraft |
|
Table 1 — List of STSs published as ‘Appendix 1 for standard scenarios supporting a declaration’ to the Annex to the UAS Regulation
When UAS operators intend to conduct an operation covered by a PDRA, they should fill in the last two columns of the table related to the selected PDRA, named ‘integrity’ and ‘proof’. In the column ‘integrity’ they should explain how the level of integrity is met, and in the column ‘proof’ how the level of integrity is demonstrated. To support UAS operators, the two columns are already prefilled; however, the UAS operator may adapt the text to their needs.
If the UAS operation does not fit completely within the limits of the PDRA, the UAS operator is required to conduct a full risk assessment and submit it to the competent authority. Changes to the PDRA should not be done, unless the competent authority accepts that minor changes should be made.
|
PDRA# |
Edition/date |
UAS characteristics |
BVLOS/VLOS |
Overflown area |
Maximum range from remote pilot |
Maximum height |
Airspace |
AMC# to Article 11 |
Notes |
|
PDRA-S01 |
1.1 / January 2022 |
Maximum characteristic dimension of up to 3 m and take-off mass of up to 25 kg |
VLOS |
Controlled ground area that might be located in a populated area |
VLOS |
150 m |
Controlled or uncontrolled, with low risk of encounter with manned aircraft |
AMC4 |
|
|
PDRA-S02 |
1.1 / January 2022 |
Maximum characteristic dimension of up to 3 m and take-off mass of up to 25 kg |
BVLOS |
Controlled ground area that is entirely located in a sparsely populated area |
2 km with an AO or with AOs 1 km, if no AO |
150 m |
Controlled or uncontrolled, with low risk of encounter with manned aircraft |
AMC5 |
|
|
PDRA-G01 |
1.2 / January 2022 |
Maximum characteristic dimension of up to 3 m and typical kinetic energy of up to 34 kJ |
BVLOS |
Sparsely populated area |
If no AO, up to 1 km |
150 m (operational volume) |
Uncontrolled, with low risk of encounter with manned aircraft |
AMC2 |
|
|
PDRA-G02 |
1.1 / January 2022 |
Maximum characteristic dimension of up to 3 m and typical kinetic energy of up to 34 kJ |
BVLOS |
Sparsely populated area |
n/a (direct C2 link) |
As established for the reserved or segregated airspace |
Reserved or segregated for the UAS operation |
AMC3 |
|
|
PDRA-G03 |
1.0 / January 2022 |
Maximum characteristic dimension of up to 3 m and typical kinetic energy of up to 34 kJ |
BVLOS |
Sparsely populated areas |
n/a (direct C2 link) |
50 m from ground unless in reserved or segregated airspace |
Controlled or uncontrolled airspace if height is below 50 m, otherwise reserved or segregated airspace |
AMC6 |
|
Table 2 — List of PDRAs published as AMC to Article 11 of the UAS Regulation
For the purposes of the SORA, the following definitions should apply:
— ‘populated area’ should be understood as ‘congested area’, as defined in Regulation (EU) No 965/2012 (the ‘Air Operations Regulation’): ‘in relation to a city, town or settlement, any area which is substantially used for residential, commercial or recreational purposes’; and
— ‘rural area’ is used in the context of the air risk and it means the volume outside a populated area and not within the aerodrome traffic zone (ATZ) of an aerodrome.
AMC1 Article 11 Rules for conducting an operational risk assessment
ED Decision 2023/012/R
SPECIFIC OPERATIONS RISK ASSESSMENT (SORA) (SOURCE JARUS SORA V2.0)
EDITION December 2020
1. Introduction
1.1 Preface
(a) This SORA is based on the document developed by JARUS, providing a vision on how to safely create, evaluate and conduct an unmanned aircraft system (UAS) operation. The SORA provides a methodology to guide both the UAS operator and the competent authority in determining whether a UAS operation can be conducted in a safe manner. The document should not be used as a checklist, nor be expected to provide answers to all the challenges related to the integration of the UAS in the airspace. The SORA is a tailoring guide that allows a UAS operator to find a best fit mitigation means, and hence reduce the risk to an acceptable level. For this reason, it does not contain prescriptive requirements, but rather safety objectives to be met at various levels of robustness, commensurate with the risk.
(b) The SORA is meant to inspire UAS operators and competent authorities and highlight the benefits of a harmonised risk assessment methodology. The feedback collected from real‑life UAS operations will form the backbone of the updates in the upcoming revisions of the document.
1.2 Purpose of the document
(a) The purpose of the SORA is to propose a methodology to be used as an acceptable means to demonstrate compliance with Article 11 of the UAS Regulation, that is to evaluate the risks and determine the acceptability of a proposed operation of a UAS within the ‘specific’ category.
(b) Due to the operational differences and the expanded level of risk, the ‘specific’ category cannot automatically take credit for the safety and performance data demonstrated with the large number of UA operating in the ‘open13 As defined by Article 4 of the UAS Regulation.’ category. Therefore, the SORA provides a consistent approach to assess the additional risks associated with the expanded and new UAS operations that are not covered by the ‘open’ category.
(c) The SORA is not intended as a one-stop-shop for the full integration of all types of UAS in all classes of airspace.
(d) This methodology may be applied where the traditional approach to aircraft certification (approving the design, issuing an airworthiness approval and type certificate) may not be appropriate due to an applicant’s desire to operate a UAS in a limited or restricted manner. This methodology may also support the activities necessary to determine the associated airworthiness requirements. This assumes that the safety objectives set forth in, or derived from, those applicable for the ‘certified’14 As defined by Article 6 of the UAS Regulation. category, are consistent with the ones set forth or derived for the ‘specific’ category.
(e) The methodology is based on the principle of a holistic/total system safety risk-based assessment model used to evaluate the risks related to a given UAS operation. The model considers the nature of all the threats associated with a specified hazard, the relevant design, and the proposed operational mitigations for a specific UAS operation. The SORA then helps to evaluate the risks systematically, and determine the boundaries required for a safe operation. This method allows the applicant to determine the acceptable risk levels, and to validate that those levels are complied with by the proposed operations. The competent authority may also apply this methodology to gain confidence that the UAS operator can conduct the operation safely.
(f) To avoid repetitive individual approvals, EASA will apply the methodology to define ‘standard scenarios’ or ‘predefined risk assessments’ for the identified types of ConOps with known hazards and acceptable risk mitigations.
(g) The methodology, related processes, and values proposed in this document are intended to guide the UAS operator when performing a risk assessment in accordance with Article 11 of the UAS Regulation.
1.3 Applicability
(a) The methodology presented in this document is aimed at evaluating the safety risks involved with the operation of UAS of any class, size or type of operation (including military, experimental, research and development and prototyping). It is particularly suited, but not limited to, ‘specific’ operations for which a hazard and a risk assessment are required.
(b) The safety risks associated with collisions between UA and manned aircraft are in the scope of the methodology. The risk of a collision between two UA or between a UA and a UA carrying people will be addressed in future revisions of the document.
(c) In the event of a mishap, the carriage of people or payloads on board the UAS (e.g. weapons) that present additional hazards is explicitly excluded from the scope of this methodology.
(d) Security aspects are excluded from the applicability of this methodology when they are not limited to those confined by the airworthiness of the systems (e.g. the aspects relevant to protection from unlawful electromagnetic interference.)
(e) Privacy and financial aspects are excluded from the applicability of this methodology.
(f) The SORA can be used to support waiving the regulatory requirements applicable to the operation if it can be demonstrated that the operation can be conducted with an acceptable level of safety.
(g) In addition to performing a SORA in accordance with the UAS Regulation, the UAS operator must also ensure compliance with all the other regulatory requirements applicable to the operation that are not necessarily addressed by the SORA.
1.4 Key concepts and definitions
1.4.1 Semantic model
(a) To facilitate effective communication of all aspects of the SORA, the methodology requires the standardised use of terminology for the phases of operation, procedures, and operational volumes. The semantic model shown in Figure 1 provides a consistent use of the terms for all SORA users. Figure 2 provides a graphical representation of the model and a visual reference to further aid the reader in understanding the SORA terminology.
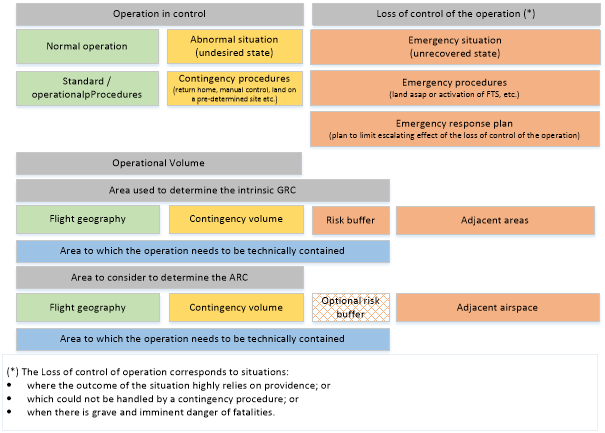 Figure 1 — SORA semantic model
Figure 1 — SORA semantic model
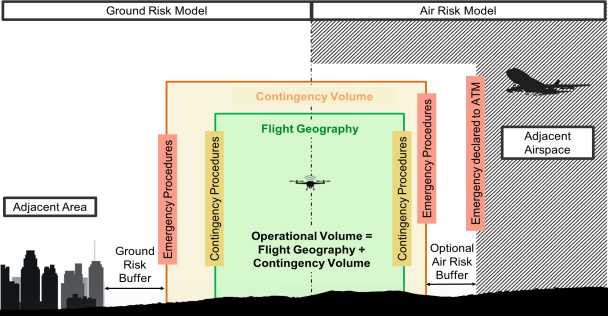
Figure 2 — Graphical representation of the SORA semantic model
1.4.2 Introduction to robustness
(a) To properly understand the SORA process, it is important to introduce the key concept of robustness. Any given risk mitigation or operational safety objective (OSO) can be demonstrated at differing levels of robustness. The SORA process proposes three different levels of robustness: low, medium and high, commensurate with the risk.
(b) The robustness designation is achieved using both the level of integrity (i.e. safety gain) provided by each mitigation, and the level of assurance (i.e. method of proof) that the claimed safety gain has been achieved. These are both risk-based.
(c) The activities used to substantiate the level of integrity are detailed in Annexes B, C, D and E. Those annexes provide either guidance material or reference industry standards and practices where applicable.
(d) General guidance for the level of assurance is provided below:
(1) A low level of assurance is where the applicant simply declares that the required level of integrity has been achieved.
(2) A medium level of assurance is where the applicant provides supporting evidence that the required level of integrity has been achieved. This is typically achieved by means of testing (e.g. for technical mitigations) or by proof of experience (e.g. for human-related mitigations).
(3) A high level of assurance is where the achieved integrity has been found to be acceptable by a competent third party.
(e) The specific criteria defined in the Annexes take precedence over the criteria defined in paragraph d.
(f) Table 1 provides guidance to determine the level of robustness based on the level of integrity and the level of assurance:
|
|
Low assurance |
Medium assurance |
High assurance |
|
Low integrity |
Low robustness |
Low robustness |
Low robustness |
|
Medium integrity |
Low robustness |
Medium robustness |
Medium robustness |
|
High integrity |
Low robustness |
Medium robustness |
High robustness |
Table 1 — Determination of robustness level
(g) For example, if an applicant demonstrates a medium level of integrity with a low level of assurance, the overall robustness will be considered to be low. In other words, the robustness will always be equal to the lowest level of either the integrity or the assurance.
1.5 Roles and responsibilities
(a) While performing a SORA process and assessment, several key actors might be required to interact in different phases of the process. The main actors applicable to the SORA are described in this section.
(b) UAS operator — The UAS operator is responsible for the safe operation of the UAS, and hence the safety risk analysis. In accordance with Article 5 of the UAS Regulation, the UAS operator must substantiate the safety of the operation by performing the specific operational and risk assessment, except for the cases defined by the same Article 5. Supporting material for the assessment may be provided by third parties (e.g. the manufacturer of the UAS or equipment, U-space service providers, etc.). The UAS operator obtains an operational authorisation from the competent authority/ANSP. A UAS operator having a LUC cannot be granted the privilege to assess compliance with the design requirements when a UAS with a design verification report15 https://www.easa.europa.eu/sites/default/files/dfu/guidelines_design_ve… (DVR) or a (restricted) type certificate ((R)TC) is required.
(c) Applicant — The applicant is the party seeking operational approval. The applicant becomes the UAS operator once the operation has been approved.
(d) UAS manufacturer — For the purposes of the SORA, the UAS manufacturer is the party that designs and/or produces the UAS. The UAS manufacturer has unique design evidence (e.g. for the system performance, the system architecture, software/hardware development documentation, test/analysis documentation, etc.) that they may choose to make available to one or many UAS operator(s) or to the competent authority to help to substantiate the UAS operator’s safety case. Alternatively, a potential UAS manufacturer may utilise the SORA to target design objectives for specific or generalised operations. To obtain airworthiness approval(s), these design objectives could be complemented by the use of certification specifications (CS) or industry consensus standards if they are found to be acceptable by EASA.
(e) Component manufacturer — The component manufacturer is the party that designs and/or produces components for use in UAS operations. The component manufacturer has unique design evidence (e.g. for the system performance, the system architecture, software/hardware development documentation, test/analysis documentation, etc.) that they may choose to make available to one or many UAS operator(s) to substantiate a safety case.
(f) Competent authority — The competent authority that is referred to throughout this AMC is the authority designated by the Member State in accordance with Article 17 of the UAS Regulation to assess the safety case of UAS operations and to issue the operational authorisation in accordance with Article 12 of the UAS Regulation. The competent authority may accept an applicant’s SORA submission in whole or in part. Through the SORA process, the applicant may need to consult with the competent authority to ensure the consistent application or interpretation of individual steps. The competent authority must perform oversight of the UAS operator in accordance with paragraphs (i) and (j) of Article 18 of the UAS Regulation. According to Regulation (EU) 2018/113916 Regulation (EU) 2018/1139 of the European Parliament and of the Council of 4 July 2018 on common rules in the field of civil aviation and establishing a European Union Aviation Safety Agency, and amending Regulations (EC) No 2111/2005, (EC) No 1008/2008, (EU) No 996/2010, (EU) No 376/2014 and Directives 2014/30/EU and 2014/53/EU of the European Parliament and of the Council, and repealing Regulations (EC) No 552/2004 and (EC) No 216/2008 of the European Parliament and of the Council and Council Regulation (EEC) No 3922/91 (OJ L 212, 22.8.2018, p. 1) (https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=CELEX%3A32018R1139). (the EASA ‘Basic Regulation’), EASA is the competent authority in the European Union to verify compliance of the UAS design and its components with the applicable rules, while the authority that is designated by the Member State is the competent authority to verify compliance with the operational requirements and compliance of the personnel’s competency with those rules. The following elements are related to the UAS design:
— OSOs #02 (limited to design criteria), #04, #05, #06, #10, #12, #18, #19 (limited to criterion #3), #20, #23 (limited to criterion #1) and #24;
— M2 mitigation for ground risk (criterion #1);
— verification of the system to contain the UAS to avoid an infringement of the adjacent areas on the ground and/or adjacent airspace, in accordance with Step #9 of the SORA process.
If the UAS operation is classified as SAIL V and VI, compliance with the design provisions defined by SORA (i.e. design-related OSOs, mitigation means linked with the design and containment function) should be demonstrated through a type certificate (TC) issued by EASA according to Annex I (Part 21) to Regulation (EU) No 748/201217 as defined in Article 40(1)(d) of Regulation (EU) 2019/94518 Commission Delegated Regulation (EU) 2019/945 of 12 March 2019 on unmanned aircraft systems and on third-country operators of unmanned aircraft systems (OJ L 152, 11.6.2019, p. 1) (https://eur-lex.europa.eu/legalcontent/EN/TXT/?uri=CELEX:32019R0945).. For the other OSOs and mitigation means, the competent authority may verify compliance or may define which entity is able to verify compliance with them as a third party.
(1) If the UAS operation is classified as SAIL IV, compliance with the design-related SORA provisions (i.e. design-related OSOs, mitigation means linked with the design and containment function) should be demonstrated through a DVR issued by EASA. Evidence of compliance with the other OSOs and mitigations (not related to design) will be provided to the competent authority according to the level of robustness of the OSOs, that will assess them as part of the application for the operational authorisation.
(2) If the UAS operation is classified as SAIL I, II or III, the competent authority may accept a declaration submitted by the UAS operator for the compliance with all OSOs and mitigations related to design. The competent authority may check the statements of the UAS operator, in particular with regard to the claimed level of integrity and robustness of the UAS for the considered SAIL.
(3) Despite the SAIL, when the claimed level of robustness of the mitigation means M2 is high, the competent authority should require the operator to use a UAS with a DVR issued by EASA limited to compliance with those mitigation means19 If the UAS has a DVR covering the full design, this may cover also the mitigation means..
(g) ANSP — The ANSP is the designated provider of air traffic service in a specific area of operation (airspace). The ANSP assesses whether the proposed flight can be safely conducted in the particular airspace that it covers, and if so, authorises the flight.
(h) U-space service provider — U-space service providers are entities that provide services to support the safe and efficient use of airspace.
(i) Remote pilot — The remote pilot is designated by the UAS operator, or, in the case of general aviation, the aircraft owner, as being charged with safely conducting the flight.
2. The SORA process
2.1 Introduction to risk
(a) Many definitions of the word ‘risk’ exist in the literature. One of the easiest and most understandable definitions is provided in SAE ARP 4754A / EUROCAE ED-79A: ‘the combination of the frequency (probability) of an occurrence and its associated level of severity’. This definition of ‘risk’ is retained in this document.
(b) The consequence of an occurrence will be designated as harm of some type.
(c) Many different categories of harm arise from any given occurrence. Various authors on this topic have collated these categories of harm as supported by the literature. This document will focus on occurrences of harm (e.g. a UAS crash) that are short-lived and usually give rise to a near loss of life. Chronic events (e.g. toxic emissions over a period of time) are explicitly excluded from this assessment. The categories of harm in this document are the potential for:
(1) fatal injuries to third parties on the ground;
(2) fatal injuries to third parties in the air; or
(3) damage to critical infrastructure.
(d) It is acknowledged that the competent authorities, when appropriate, may consider additional categories of harm (e.g. the disruption of a community, environmental damage, financial loss, etc.). This methodology could also be used for those categories of harm.
(e) Several studies have shown that the amount of energy needed to cause fatal injuries, in the case of a direct hit, is extremely low (i.e. in the region of few dozen Joules.) The energy levels of operations addressed within this document are likely to be significantly higher, and therefore the retained harm is the potential for fatal injuries. By application of the methodology, the applicant has the opportunity to claim lower lethality either on a case‑by-case basis, or systematically if allowed by the competent authorities (e.g. in the ‘open’ category).
(f) Fatal injury is a well-defined condition and, in most countries, is known by the authorities. Therefore, the risk of under-reporting fatalities is almost non-existent. The quantification of the associated risk of fatality is straightforward. The usual means to measure fatalities is by the number of deaths within a particular time interval (e.g. the fatal accident rate per million flying hours), or the number of deaths for a specified circumstance (e.g. the fatal accident rate per number of take-offs).
(g) Damage to critical infrastructure is a more complex condition. Therefore, the quantification of the associated risks may be difficult and subject to cooperation with the organisation responsible for the infrastructure.
2.2 SORA process outline
(a) The SORA methodology provides a logical process to analyse the proposed ConOps and establish an adequate level of confidence that the operation can be conducted with an acceptable level of risk. There are ten steps that support the SORA methodology and each of these steps is described in the following paragraphs and further detailed, when necessary, in the relevant annexes.
(b) The SORA focuses on the assessment of air and ground risks. In addition to air and ground risks, an additional risk assessment of critical infrastructure should also be performed. This should be done in cooperation with the organisation responsible for the infrastructure, as they are most knowledgeable of those threats. Figure 3 outlines the ten steps of the risk model, while Figure 4 provides an overall understanding of how to arrive at an air risk class (ARC) for a given operation.
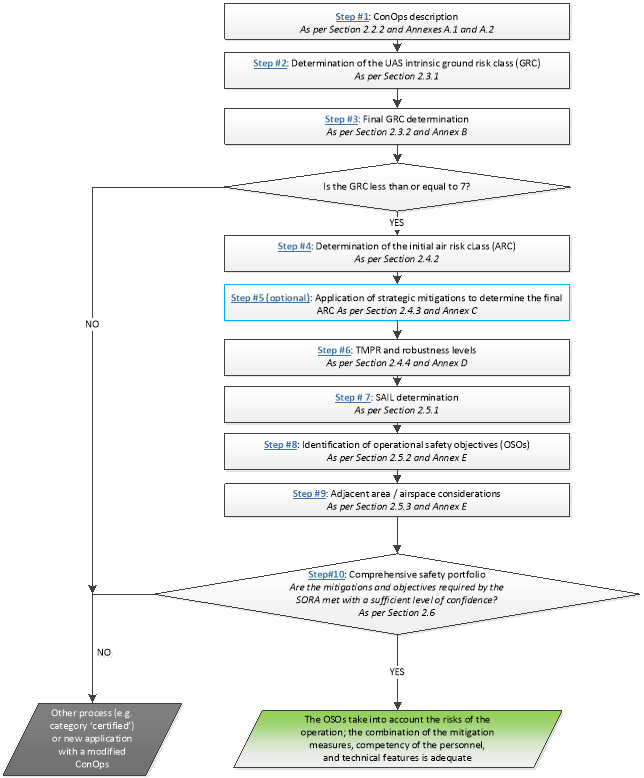
Figure 3 — The SORA process
Note: If operations are conducted across different environments, some steps may need to be repeated for each particular environment.
2.2.1 Pre-application evaluation
(a) Before starting the SORA process, the applicant should verify that the proposed operation is feasible (i.e. not subject to specific exclusions from the competent authority or subject to an STS). Things to verify before beginning the SORA process are whether:
(1) the operation falls under the ‘open’ category;
(2) the operation is covered by a ‘standard scenario’ included in the appendix to the UAS Regulation or by a ‘predefined risk assessment’ published by EASA;
(3) the operation falls under the ‘certified’ category; or
(4) the operation is subject to a specific NO-GO from the competent authority.
If none of the above cases applies, the SORA process should be applied.
2.2.2 Step #1 — ConOps description
(a) The first step of the SORA requires the applicant to collect and provide the relevant technical, operational and system information needed to assess the risk associated with the intended operation of the UAS. Annex A to this document provides a detailed framework for data collection and presentation. The ConOps description is the foundation for all other activities, and it should be as accurate and detailed as possible. The ConOps should not only describe the operation, but also provide insight into the UAS operator’s operational safety culture. It should also include how and when to interact with the ANSP. Therefore, when defining the ConOps, the UAS operator should give due consideration to all the steps, mitigations and OSOs provided in Figures 3 and 4.
(b) Developing the ConOps can be an iterative process; therefore, as the SORA process is applied, additional mitigations and limitations may be identified, requiring additional associated technical details, procedures, and other information to be provided/updated in the ConOps. This should culminate in a comprehensive ConOps that fully and accurately describes the proposed operation as envisioned.
2.3 The ground risk process
2.3.1 Step #2 – Determination of the intrinsic UAS ground risk class (GRC)
(a) The intrinsic UAS ground risk relates to the risk of a person being struck by the UAS (in the case of a loss of UAS control with a reasonable assumption of safety).
(b) To establish the intrinsic GRC, the applicant needs the maximum UA characteristic dimension (e.g. the wingspan for a fixed-wing UAS, the blade diameter for rotorcraft, the maximum dimension for multi-copters, etc.) and the knowledge of the intended operational scenario.
(c) The applicant needs to have defined the area at risk when conducting the operation (also called the ‘area of operation’) including:
(1) the operational volume, which is composed of the flight geography and the contingency volume. To determine the operational volume, the applicant should consider the position-keeping capabilities of the UAS in 4D space (latitude, longitude, height and time). In particular, the accuracy of the navigation solution, the flight technical error20 The flight technical error is the error between the actual track and the desired track (sometimes referred to as ‘the ability to fly the flight director’). of the UAS and the path definition error (e.g. map errors), and latencies should be considered and addressed in this determination;
(2) whether or not the area is a controlled ground area; and
(3) the associated ground risk buffer with at least a 1:1 rule21 If the UA is planned to operate at 120 m altitude, the ground risk buffer should at least be 120 m., or for rotary wing UA, defined using a ballistic methodology approach acceptable to the competent authority.
(d) Table 2 illustrates how to determine the intrinsic ground risk class (GRC). The intrinsic GRC is found at the intersection of the applicable operational scenario and the maximum UA characteristic dimension that drives the UAS lethal area. If there is a mismatch between the maximum UAS characteristic dimension and the typical kinetic energy expected, the applicant should provide substantiation for the chosen column.
Table 2 — Determination of the intrinsic GRC
(e) The operational scenarios describe an attempt to provide discrete categorisations of operations with increasing numbers of people at risk. In principle, it is possible to use either qualitative criteria (please refer to next point (f)) or quantitative criteria, or consider both criteria, to assess if an operation takes place over sparsely populated areas, populated areas, or assemblies of people.
(f) Qualitative assessment: the volume to be used by the operator to classify the operation includes the operational volume and the ground risk buffer (as defined by a semantic model), which determine the intrinsic GRC.
GM1 Article 2(3) ‘Definitions I DEFINITION OF ‘ASSEMBLIES OF PEOPLE’’ provides guidance on when an operation is classified as taking place over assemblies of people.
An operation should be classified as taking place over a populated area if the volume that is used to determine the intrinsic GRC:
— does not include assemblies of people, and
— includes areas that are substantially used for residential, commercial or recreational purposes.
(g) EVLOS23 EVLOS — A UAS operation whereby the remote pilot maintains uninterrupted situational awareness of the airspace in which the UAS operation is being conducted via visual airspace surveillance through one or more human VOs, possibly aided by technological means. The remote pilot has direct control of the UAS at all times. operations are to be considered to be BVLOS for the intrinsic GRC determination.
(h) Controlled ground areas24 See the definition in Article 2(21) of the UAS Regulation. are a way to strategically mitigate the risk on ground (similar to flying in segregated airspace); the UAS operator should ensure, through appropriate procedures, that no uninvolved person is in the area of operation, as defined in Section 2.3.1(c).
(i) An operation occurring in a populated environment cannot be intrinsically classified as being in a sparsely populated environment, even in cases where the footprint of the operation is completely within special risk areas (e.g. rivers, railways, and industrial estates). The applicant can make the claim for a lower density and/or shelter with Step #3 of the SORA process.
(j) Operations that do not have a corresponding intrinsic GRC (i.e. grey cells on the table) are not supported by the SORA methodology.
(k) When evaluating the typical kinetic energy expected for a given operation, the applicant should generally use the airspeed, in particular Vcruise for fixed-wing aircraft and the terminal velocity for other aircraft. Specific designs (e.g. gyrocopters) might need additional considerations. Guidance useful in determining the terminal velocity can be found at https://www1.grc.nasa.gov/beginners-guide-to-aeronautics/termvel/.
(l) The nominal size of the crash area for most UAS can be anticipated by considering both the size and the energy used in the ground risk determination. There are certain cases or design aspects that are non-typical and will have a significant effect on the lethal area of the UAS, such as the amount of fuel, high-energy rotors/props, frangibility, material, etc. These may not have been considered in the intrinsic GRC determination table. These considerations may lead to a decrease/increase in the intrinsic GRC. The use of industry standards or dedicated research might provide a simplified path for this assessment.
2.3.2 Step #3 – Final GRC determination
(a) The intrinsic risk of a person being struck by the UAS (in case of a loss of control of the operation) can be controlled and reduced by means of mitigation.
(b) The mitigations used to modify the intrinsic GRC have a direct effect on the safety objectives associated with a particular operation, and therefore it is important to ensure their robustness. This has particular relevance for technical mitigations associated with the ground risk (e.g. an emergency parachute).
(c) The final GRC determination (step #three) is based on the availability of these mitigations to the operation. Table 3 provides a list of potential mitigations and the associated relative correction factor. A positive number denotes an increase in the GRC, while a negative number results in a decrease in the GRC. All the mitigations should be applied in numeric sequence to perform the assessment. Annex B provides additional details on how to estimate the robustness of each mitigation. Competent authorities may define additional mitigations and the relative correction factors.
Table 3 — Mitigations for final GRC determination
(d) When applying mitigation M1, the GRC cannot be reduced to a value lower than the lowest value in the applicable column in Table 2. This is because it is not possible to reduce the number of people at risk below that of a controlled area.
(e) For example, in the case of a 2.5 m UAS (second column in Table 2) flying in visual line-of-sight (VLOS) over a sparsely populated area, the intrinsic GRC is 3. Upon analysis of the ConOps, the applicant claims to reduce the ground risk by first applying M1 at medium robustness (a GRC reduction of 2). In this case, the result of applying M1 is a GRC of 2, because the GRC cannot be reduced any lower than the lowest value for that column. The applicant then applies M2 using a parachute system, resulting in a further reduction of 1 (i.e. a GRC of 1). Finally, M3 (the ERP) has been developed to medium robustness with no further reduction as per Table 3.
(f) The final GRC is established by adding all the correction factors (i.e. -1-1-0=-2) and adapting the GRC by the resulting number (3-2=1).
(g) If the final GRC is greater than 7, the operation is not supported by the SORA process.
(h) In general, a quantitative approach to mitigation means allows to reduce the intrinsic GRC by 1 point if the mitigation means reduce the risk of the operation by a factor of approximately 10 (90 % reduction) compared to the risk that is assessed before the mitigation means are applied. Such quantitative criteria should be used to validate the risk reduction that is claimed when applying Annex B to AMC1 to Article 11.
2.4 The air risk process
2.4.1 Air risk process overview
(a) The SORA uses the operational airspace defined in the ConOps as the baseline to evaluate the intrinsic risk of a mid-air collision, and by determining the air risk category (ARC). The ARC may be modified/lowered by applying strategic and tactical mitigation means. The application of strategic mitigations may lower the ARC level. An example of strategic mitigations to reduce the risk of a collision may be by operating during certain time periods or within certain boundaries. After applying the strategic mitigations, any residual risk of a mid-air collision is addressed by means of tactical mitigations.
(b) Tactical mitigations take the form of detect and avoid (DAA) systems or alternate means, such as ADS-B, FLARM, U-space services or operational procedures. Depending on the residual risk of a mid-air collision, the tactical mitigation performance requirement(s) (TMPR(s)) may vary.
(c) As part of the SORA process, the UAS operator should cooperate with the relevant service provider for the airspace (e.g. the ANSP or U-space service provider) and obtain the necessary authorisations. Additionally, generic local authorisations or local procedures allowing access to a certain portion of controlled airspace may be used if available (e.g. the Low Altitude Authorization and Notification Capability – LAANC – system in the United States).
(d) Irrespective of the results of the risk assessment, the UAS operator should pay particular attention to all the features that may increase the detectability of the UA in the airspace. Therefore, technical solutions that improve the electronic conspicuousness or detectability of the UAS are recommended.
2.4.2 Step #4 - Determination of the initial air risk class (ARC)
(a) The competent authority, ANSP, or U-space service provider, may elect to directly map the airspace collision risks using airspace characterisation studies. These maps would directly show the initial ARC for a particular volume of airspace. If the competent authority, ANSP, or U-space service provides an air collision risk map (static or dynamic), the applicant should use that service to determine the initial ARC, and go directly to Section 2.4.3 ‘Application of strategic mitigations’ to reduce the initial ARC.
(b) As seen in Figure 4, the airspace is categorised into 13 aggregated collision risk categories. These categories were characterised by the altitude, controlled versus uncontrolled airspace, airport/heliport versus non‑airport/non-heliport environments, airspace over urban versus rural environments, and lastly atypical (e.g. segregated) versus typical airspace.
(c) To assign the proper ARC for the type of UAS operation, the applicant should use the decision tree found in Figure 4.
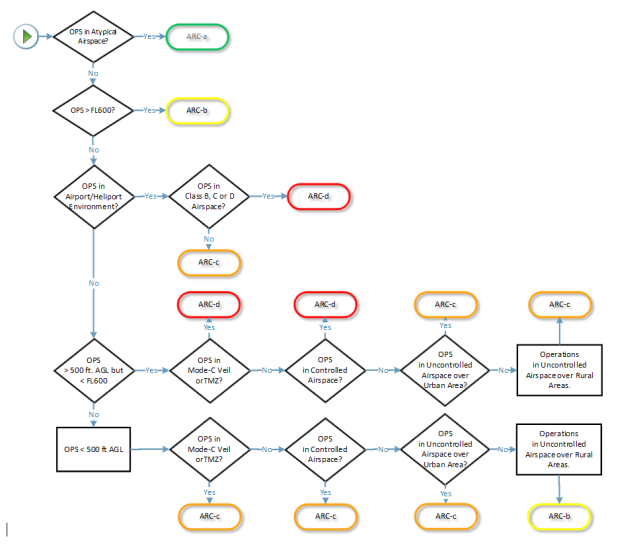
Figure 4 — ARC assignment process
(d) The ARC is a qualitative classification of the rate at which a UAS would encounter a manned aircraft in typical generalised civil airspace. The ARC is an initial assignment of the aggregated collision risk for the airspace, before mitigations are applied. The actual collision risk of a specific local operational volume could be much different, and can be addressed with the application of strategic mitigations to reduce the ARC (this step is optional, see Section 2.4.3, Step #5).
(e) Although the static generalised risk put forward by the ARC is conservative (i.e. it stays on the safe side), there may be situations where that conservative assessment may not suffice. It is important for both the competent authority and the UAS operator to take great care to understand the operational volume and under which circumstances the definitions in Figure 4 could be invalidated. In some situations, the competent authority may raise the operational volume ARC to a level which is greater than that advocated by Figure 4. The ANSP should be consulted to ensure that the assumptions related to the operational volume are accurate.
(f) ARC-a is generally defined as airspace where the risk of a collision between a UAS and a manned aircraft is acceptable without the addition of any tactical mitigation.
(g) ARC-b, ARC-c, ARC-d generally define volumes of airspace with increasing risk of a collision between a UAS and a manned aircraft.
(h) During the UAS operation, the operational volume may span many different airspace environments. The applicant needs to perform an air risk assessment for the entire range of the operational volume. An example scenario of operations in multiple airspace environments is provided at the end of Annex C.
2.4.3 Step #5 — Application of strategic mitigations to determine the residual ARC (optional)
(a) As stated before, the ARC is a generalised qualitative classification of the rate at which a UAS would encounter a manned aircraft in the specific airspace environment. However, it is recognised that the UAS operational volume may have a different collision risk from the one that the generalised initial ARC assigned.
(b) If an applicant considers that the generalised initial ARC assigned is too high for the condition in the local operational volume, then they should refer to Annex C for the ARC reduction process.
(c) If the applicant considers that the generalised initial ARC assignment is correct for the condition in the local operational volume, then that ARC becomes the residual ARC.
2.4.4 Step #6 — TMPR and robustness levels
Tactical mitigations are applied to mitigate any residual risk of a mid-air collision that is needed to achieve the applicable airspace safety objective. Tactical mitigations will take the form of either ‘see and avoid’ (i.e. operations under VLOS), or they may require a system which provides an alternate means of achieving the applicable airspace safety objective (operation using a DAA, or multiple DAA systems). Annex D provides the method for applying tactical mitigations.
2.4.4.1 Operations under VLOS/EVLOS
(a) VLOS is considered to be an acceptable tactical mitigation for collision risk for all ARC levels. Notwithstanding the above, the UAS operator is advised to consider additional means to increase the situational awareness with regard to air traffic operating in the vicinity of the operational volume.
(b) Operational UAS flights under VLOS do not need to meet the TMPR, nor the TMPR robustness requirements. In the case of multiple segments of the flight, those segments conducted under VLOS do not have to meet the TMPR, nor the TMPR robustness requirements, whereas those conducted under BVLOS do need to meet the TMPR and the TMPR robustness requirements.
(c) In general, all VLOS requirements are applicable to EVLOS. EVLOS may have additional requirements over and above those of VLOS. The EVLOS verification and communication latency between the remote pilot and the observers should be less than 15 seconds.
(d) Notwithstanding the above, the applicant should have a documented VLOS de-confliction scheme, in which the applicant explains which methods will be used for detection, and defines the associated criteria applied for the decision to avoid incoming traffic. If the remote pilot relies on detection by observers, the use of phraseology will have to be described as well.
(e) For VLOS operations, it is assumed that an observer is not able to detect traffic beyond 2 NM. (Note that the 2 NM range is not a fixed value and it may largely depend on the atmospheric conditions, aircraft size, geometry, closing rate, etc.). Therefore, the UAS operator may have to adjust the operation and/or the procedures accordingly.
2.4.4.2 Operations under a DAA system — TMPR
(a) For operations other than VLOS, the applicant will use the residual ARC and Table 4 below to determine the TMPR.
|
Residual ARC |
TMPRs |
TMPR level of robustness |
|
ARC-d |
High |
High |
|
ARC-c |
Medium |
Medium |
|
ARC-b |
Low |
Low |
|
ARC-a |
No requirement |
No requirement |
Table 4 — TMPRs and TMPR level of robustness assignment
(b) High TMPR (ARC-d): This is airspace where either the manned aircraft encounter rate is high, and/or the available strategic mitigations are low. Therefore, the resulting residual collision risk is high, and the TMPR is also high. In this airspace, the UAS may be operating in integrated airspace and will have to comply with the operating rules and procedures applicable to that airspace, without reducing the existing capacity, decreasing safety, negatively impacting current operations with manned aircraft, or increasing the risk to airspace users or persons and property on the ground. This is no different from the requirements for the integration of comparable new and novel technologies in manned aviation. The performance level(s) of those tactical mitigations and/or the required variety of tactical mitigations are generally higher than for the other ARCs. If operations in this airspace are conducted more routinely, the competent authority is expected to require the UAS operator to comply with the recognised DAA system standards (e.g. those developed by RTCA SC-228 and/or EUROCAE WG-105).
(c) Medium TMPR (ARC-c): A medium TMPR will be required for operations in airspace where the chance of encountering manned aircraft is reasonable, and/or the strategic mitigations available are medium. Operations with a medium TMPR will likely be supported by the systems currently used in aviation to aid the remote pilot in the detection of other manned aircraft, or by systems designed to support aviation that are built to a corresponding level of robustness. Traffic avoidance manoeuvres could be more advanced than for a low TMPR.
(d) Low TMPR (ARC-b): A low TMPR will be required for operations in airspace where the probability of encountering another manned aircraft is low, but not negligible, and/or where strategic mitigations address most of the risk, and the resulting residual collision risk is low. Operations with a low TMPR are supported by technology that is designed to aid the remote pilot in detecting other traffic, but which may be built to lower standards. For example, for operations below 120 m, the traffic avoidance manoeuvres are expected to mostly be based on a rapid descent to an altitude where manned aircraft are not expected to ever operate.
(e) No performance requirement (ARC-a): This is airspace where the manned aircraft encounter rate is expected to be extremely low, and therefore there is no requirement for a TMPR. It is generally defined as airspace where the risk of a collision between a UAS and a manned aircraft is acceptable without the addition of any tactical mitigation. An example of this may be UAS flight operations in some parts of Alaska or northern Sweden, where the manned aircraft density is so low that the airspace safety threshold could be met without any tactical mitigation.
(f) Annex D provides information on how to satisfy the TMPR based on the available tactical mitigations and the TMPR level of robustness.
2.4.4.3 Consideration of additional airspace/operational requirements
(a) Modifications to the initial and subsequent approvals may be required by the competent authority or the ANSP as safety and operational issues arise.
(b) The UAS operator and the competent authority need to be cognisant that the ARCs are a generalised qualitative classification of the collision risk. Local circumstances could invalidate the aircraft density assumptions of the SORA, for example, due to special events. It is important for both the competent authority and the UAS operator to fully understand the airspace and air‑traffic flows, and develop a system which can alert UAS operators to changes to the airspace on a local level. This will allow the UAS operator to safely address the increased risks associated with these events.
(c) There are many airspace, operational and equipment requirements which have a direct impact on the collision risk of all aircraft in the airspace. Some of these requirements are general and apply to all volumes of airspace, while some are local and are required only for a particular volume of airspace. The SORA cannot possibly cover all the possible requirements for all the conditions in which the UAS operator may wish to operate. The applicant and the competent authority need to work closely together to define and address these additional requirements.
(d) The SORA process should not be used to support operations of a UAS in a given airspace without the UAS being equipped with the required equipment for operations in that airspace (e.g. the equipment required to ensure interoperability with other airspace users). In these cases, specific exemptions may be granted by the competent authority. Those exemptions are outside the scope of the SORA.
(e) Operations in controlled airspace, an airport/heliport environment or a Mode-C Veil/transponder mandatory zone (TMZ) will likely require prior approval from the ANSP. The applicant should ensure that they involve the ANSP/authority prior to commencing operations in these environments.
2.5 Final assignment of specific assurance and integrity level (SAIL) and OSO
2.5.1 Step #7 SAIL determination
(a) The SAIL parameter consolidates the ground and air risk analyses, and drives the required activities. The SAIL represents the level of confidence that the UAS operation will remain under control.
(b) After determining the final GRC and the residual ARC, it is then possible to derive the SAIL associated with the proposed ConOps.
(c) The level of confidence that the operation will remain under control is represented by the SAIL. The SAIL is not quantitative, but instead corresponds to:
(1) the OSO to be complied with (see Table 6);
(2) the description of the activities that might support compliance with those objectives; and
(3) the evidence that indicates that the objectives have been satisfied.
(d) The SAIL assigned to a particular ConOps is determined using Table 5:
|
SAIL determination |
||||
|
|
Residual ARC |
|||
|
Final GRC |
a |
b |
c |
d |
|
≤2 |
I |
II |
IV |
VI |
|
3 |
II |
II |
IV |
VI |
|
4 |
III |
III |
IV |
VI |
|
5 |
IV |
IV |
IV |
VI |
|
6 |
V |
V |
V |
VI |
|
7 |
VI |
VI |
VI |
VI |
|
>7 |
Category C operation |
|||
Table 5 — SAIL determination
2.5.2 Step #8 — Identification of the operational safety objectives (OSOs)
(a) The last step of the SORA process is to use the SAIL to evaluate the defences within the operation in the form of OSOs, and to determine the associated level of robustness. Table 6 provides a qualitative methodology to make this determination. In this table, O is optional, L is recommended with low robustness, M is recommended with medium robustness, and H is recommended with high robustness. The various OSOs are grouped based on the threat they help to mitigate; hence, some OSOs may be repeated in the table.
(b) Table 6 is a consolidated list of the common OSOs that historically have been used to ensure safe UAS operations. It represents the collected experience of many experts, and is therefore a solid starting point to determine the required safety objectives for a specific operation. The competent authorities that issue the operational authorisation may define additional OSOs for a given SAIL and the associated level of robustness.
Table 6 — Recommended OSOs
2.5.3 Step #9 – Adjacent area/airspace considerations
(a) The objective of this section is to address the risk posed by a loss of control of the operation, resulting in an infringement of the adjacent areas on the ground and/or adjacent airspace. These areas may vary with different flight phases.
(b) Safety requirements for ‘basic containment’ are:
(c) The enhanced containment applies to operations conducted:
(1) either where the adjacent areas:
(i) contain assemblies of people30 See the definition in Article 2(3) of the UAS Regulation. unless the UAS is already approved for operations over assemblies of people; or
(ii) are ARC-d unless the residual ARC of the airspace area intended to be flown within the operational volume is already ARC-d;
(2) Or where the operational volume is in a populated area where:
(i) M1 mitigation has been applied to lower the GRC; or
(ii) operating in a controlled ground area.
(d) The enhanced containment consists in the following safety requirements:
For UA with maximum characteristic dimensions not greater than 3 m, operated up to SAIL II operations, the competent authority may accept a declaration from the applicant for the compliance with the MoC to Light-UAS.251132Final Means of Compliance with Light-UAS.2511 MOC Light-UAS.2511-01 - Issue 01 | EASA (europa.eu). For UAS configurations exceeding the applicability of such MoC33EASA is developing MoC applicable to different UAS configurations. Until these are available, the competent authority may define means of compliance for special configurations (e.g. tethered drones) where a DVR may not be appropriate., the competent authority may decide to still accept declarations based on such MoC with evidence available, or to accept appropriate MoC proposed by the applicant. Otherwise, the competent authority may request the applicant to use a UAS for which EASA has verified the claimed integrity.
As it is not possible to anticipate all local situations, the UAS operator, the competent authority and the ANSP should use sound judgement with regard to the definition of the ‘adjacent airspace’ as well as the ‘adjacent areas’. For example, for a small UAS with a limited range, these definitions are not intended to include busy airport/heliport environments 30 kilometres away. The airspace bordering the UAS volume of operation should be the starting point of the determination of the adjacent airspace. In exceptional cases, the airspace beyond those volumes that border the UAS volume of operation may also have to be considered.
Note 1: The safety requirements as proposed in this section cover both the integrity and assurance levels.
Note 2: The third safety requirement in Section 2.5.3(c) does not imply a systematic need to develop the SW and AEH according to an industry standard or methodology recognised as adequate by the competent authority. The use of the term ‘directly’ means that a development error in a software or an airborne electronic hardware would lead the UA outside the ground risk buffer without the possibility for another system to prevent the UA from exiting the operational volume.
2.6 Step #10 — comprehensive safety portfolio
(a) The SORA process provides the applicant, the competent authority and the ANSP with a methodology which includes a series of mitigations and safety objectives to be considered to ensure an adequate level of confidence that the operation can be safely conducted. These are:
(1) mitigations used to modify the intrinsic GRC;
(2) strategic mitigations for the initial ARC;
(3) tactical mitigations for the residual ARC;
(4) adjacent area/airspace considerations; and
(5) OSOs.
(b) The satisfactory substantiation of the mitigations and objectives required by the SORA process provides a sufficient level of confidence that the proposed operation can be safely conducted.
(c) The UAS operator should be sure to address any additional requirements that were not identified by the SORA process (e.g. for security, environmental protection, etc.) and identify the relevant stakeholders (e.g. environmental protection agencies, national security bodies, etc.). The activities performed within the SORA process will likely address those additional needs, but they may not be considered to be sufficient at all times.
(d) The UAS operator should ensure the consistency between the SORA safety case and the actual operational conditions (i.e. at the time of the flight).
ED Decision 2019/021/R
CONOPS: GUIDELINES ON COLLECTING AND PRESENTING SYSTEM AND OPERATIONAL INFORMATION FOR SPECIFIC UAS OPERATIONS
A.0 General guidelines
This document must be original work completed and understood by the applicant (operator). Applicants must take responsibility for their own safety cases, whether the material originates from this template or otherwise.
A.0.1 Document control
Applicants should include an amendment record at the beginning of the document to record changes and show how that the document is controlled.
|
Amendment/ Revision/ Issue Number |
Date |
Amended by |
Signed |
|
a, b, c or 1, 2, 3 etc. |
DDMMYYYY |
Name of the person carrying out the amendment/ revision/ issue number |
Signature of person carrying out the amendment/ revision/ issue number |
This section is critical to ensure appropriate document control.
Any significant changes to the ConOps may require further assessment and approval by the competent authority prior to further operations being conducted.
A.0.2 References
(a) List all references (documents, URL, manuals, appendices) mentioned in the ConOps:
|
# |
Title |
Description |
Amendment/ Revision/ Issue Number |
|
[1] |
|
|
|
|
[2] |
|
|
|
A.1 Guidance for the collection and presentation of operationally relevant information
The template below provides section headings detailing the subject areas that should be addressed when producing the ConOps, for the purposes of demonstrating that a UAS operation can be conducted safely. The template layouts as presented are not prescriptive, but the subject areas detailed should be included in the ConOps documentation as required for the particular operation(s), in order to provide the minimum required information and evidence to perform the SORA.
A.1.2 Organisation overview
(a) This section describes how the organisation is defined, to support safe operations. It should include:
(1) the structure of the organisation and its management, and
(2) the responsibilities and duties of the UAS operator.
(a) The ‘specific’ category covers operations where the operational risks are higher and therefore the management of safety is particularly important. The applicant should describe how safety is integrated in the organisation, and the safety management system that is in place, if applicable.
(b) Any additional safety-related information should be provided.
(b) It should provide information on the manufacturer of the UAS to be used if the UAS is not manufactured or produced by the operator, i.e. by a third-party manufacturer.
(c) If required, information on the production organisation of the third‑party organisation should be provided as evidence.
A.1.2.3 Training of staff involved in operations
This section should describe the training organisation or entity that qualifies all the staff involved in operations with respect to the ConOps.
This section should describe:
(a) the general maintenance philosophy of the UAS;
(b) the maintenance procedures for the UAS; and
(c) the maintenance organisation, if required.
This section should describe:
(a) the responsibilities and duties of personnel, including all the positions and people involved, for functions such as:
(1) the remote pilot (including the composition of the flight team according to the nature of the operation, its complexity, the type of UAS, etc.); and
(2) support personnel (e.g. visual observers (VOs), launch crew, and recovery crew);
(b) the procedure for multi-crew coordination if more than one person is directly involved in the flight operations;
(c) the operation of different types of UAS, including details of any limitations to the types of UAS that a remote pilot may operate, if appropriate; and
(d) details of the operator’s policy on crew health requirements, including any procedures, guidance or references to ensure that the flight team are appropriately fit, capable and able to conduct the planned operations.
A.1.2.6 UAS configuration management
This section should describe how the operator manages changes to the UAS configuration.
A.1.2.7 Other position(s) and other information
Any other position defined in the organisation, or any other relevant information, should be provided.
(a) Detailed description of the ConOps: the applicant should describe what types of operations the UAS operator intends to carry out. The detailed description should contain all the information needed to obtain a detailed understanding of how, where and under which limitations or conditions the operations shall be performed. The operational volume, including the ground and air risk buffers, needs to be clearly defined. Relevant charts/diagrams, and any other information helpful to visualise and understand the intended operation(s) should be included in this section.
(b) The applicant should provide specific details on the type of operations (e.g. VLOS, BVLOS), the population density to be overflown (e.g. away from people, sparsely populated, assemblies of people) and the type of airspace to be used (e.g. a segregated area, fully integrated).
(c) The applicant should describe the level of involvement (LoI) of the crew and any automated or autonomous systems during each phase of the flight.
A.1.3.2 Normal operation strategy
(a) The normal operation strategy should contain all the safety measures, such as technical or procedural measures, crew training, etc. that are put in place to ensure that the UAS can fulfil the operation within the approved limitations, and so that the operation remains in control.
(b) Within this section, it should be assumed that all systems are working normally and as intended.
(c) The intent of this chapter is to provide a clear understanding of how the operation takes place within the approved technical, environmental, and procedural limitations.
A.1.3.3 Standard operating procedures
This section should describe the standard operating procedures (SOP) applicable to all operations for which an approval is requested. A reference to the applicable operations manual (OM) is acceptable. Note: Checklists and SOP templates may be provided by the local competent authority or a qualified entity.
A.1.3.3.1 Normal operating procedures
This section should describe the normal operating procedures in place for the intended operations.
A.1.3.3.2 Contingency and emergency procedures
This section should describe the contingency procedures in place for any malfunction or abnormal operation, as well as an emergency.
A.1.3.3.3 Occurrence reporting procedures
UAS, like all aircraft, are subject to accident investigations and occurrence reporting schemes. Mandatory or voluntary reporting should be carried out using the reporting processes provided by the competent authorities. As a minimum, the SOP should contain:
(a) reporting procedures in case of:
(1) damage to property;
(2) a collision with another aircraft; or
(3) a serious or fatal injury (third parties and own personnel); and
(b) documentation and data logging procedures: describe how records and information are stored and made available, if required, to the accident investigation body, competent authority, and other government entities (e.g. police) as applicable.
A.1.3.4 Operational limits
This section should detail the specific operating limitations and conditions appropriate to the proposed operation(s); for example, operating heights, horizontal distances, weather conditions, the applicable flight performance envelope, times of operations (day and/or night) and any limitations for operating within the applicable class(es) of airspace, etc.
A.1.3.5 Emergency response plan (ERP)
The applicant should:
(a) define a response plan for use in the event of a loss of control of the operation;
(b) describe the procedures to limit the escalating effects of a crash; and
(c) describe the procedures for use in the event of a loss of containment.
This section describes the processes and procedures that the UAS operator uses to develop and maintain the necessary competence for the remote crew (i.e. any person involved in the UAS operation).
A.1.4.2 Initial training and qualification
This section describes the processes and procedures that the UAS operator uses to ensure that the remote crew is suitably competent, and how the qualification of the remote crew is carried out.
A.1.4.3 Procedures for maintenance of currency
This section describes the processes and procedures that the UAS operator uses to ensure that the remote crew acquire and maintain the required currency to execute the various types of duties.
A.1.4.4 Flight simulation training devices (FSTDs)
This section:
(a) describes the use of FSTDs for acquiring and maintaining the practical skills of the remote pilots (if applicable); and
(b) describes the conditions and restrictions in connection with such training (if applicable).
This section provides a reference to the applicable training programme(s) for the remote crew.
A2 Guidance for the collection and presentation of technical relevant information
The aim of this section is to collect all the necessary technical information about the UAS and its supporting systems. This information needs to be sufficient to address the required robustness levels of the mitigations and the OSOs of the SORA.
The list below is suggested guidance for items which may be relevant for this assessment, but the items may differ, depending on the specific UAS utilised in this ConOps.
A.2.2 UAS description
A.2.2.1 Unmanned aircraft (UA) segment
This section should include the following:
(a) A detailed description of the physical characteristics of the UA (mass, centre‑of-mass, dimensions, etc.), including photos, diagrams and schematics, if appropriate to support the description of the UA.
(1) Dimensions: for fixed-wing UA, the wingspan, fuselage length, body diameter etc.; for a rotorcraft, the length, width and height, propeller diameter, etc.;
(2) Mass: all the relevant masses such as the empty mass, MTOM, etc.; and
(3) Centre of gravity: the centre of gravity and limits if necessary.
(b) Materials: the main materials used and where they are used in the UA, highlighting in particular any new materials (new metal alloys or composites) or combinations of materials (composites ‘tailored’ to designs).
(c) Load limits: the capability of the airframe structure to withstand expected flight load limits.
(d) Sub-systems: any sub-systems such as a hydraulic system, environmental control system, parachute, brakes, etc.
A.2.2.1.2 UA performance characteristics
This section should include the following:
(a) the performance of the UA within the proposed flight envelope, specifically addressing at least the following items:
(1) Performance: the
(i) maximum altitude;
(ii) maximum endurance;
(iii) maximum range;
(iv) maximum rate of climb;
(v) maximum rate of descent;
(vi) maximum bank angle; and
(vii) turn rate limits.
(2) Airspeeds: the
(i) slowest speed attainable;
(ii) stall speed (if applicable);
(iii) nominal cruise speed;
(iv) max cruise speed; and
(v) never-exceed airspeed.
(b) Any performance limitations due to environmental and meteorological conditions, specifically addressing the following items:
(1) wind speed limitations (headwind, crosswind, gusts);
(2) turbulence restrictions;
(3) rain, hail, snow, ash resistance or sensitivities;
(4) the minimum visibility conditions, if applicable;
(5) outside air temperature (OAT) limits; and
(6) in-flight icing:
(i) whether the proposed operating environment includes operations in icing conditions;
(ii) whether the system has an icing detection capability, and if so, what indications, if any, the system provides to the remote pilot, and/or how the system responds; and
(iii) any icing protection capability of the UA, including any test data that demonstrates the performance of the icing protection system.
This section should include the following:
A description of the propulsion system and its ability to provide reliable and sufficient power to take off, climb, and maintain flight at the expected mission altitudes.
(b) Fuel-powered propulsion systems
(1) The type (manufacturer organisation and model) of engine that is used;
(2) How many engines are installed;
(3) The type and the capacity of fuel that is used;
(4) How the engine performance is monitored;
(5) The status indicators, alerts (such as warning, caution and advisory), messages that are provided to the remote pilot;
(6) A description of the most critical propulsion-related failure modes/conditions and their impact on the operation of the system;
(7) How the UA responds, and the safeguards that are in place to mitigate the risk of a loss of engine power for each of the following:
(i) fuel starvation;
(ii) fuel contamination;
(iii) failed signal input from the remote pilot station (RPS); and
(iv) engine controller failure;
(8) The in-flight restart capabilities of the engine, if applicable, and if so, a description of the manual and/or automatic features of this capability;
(9) The fuel system and how it allows for adequate control of the fuel delivery to the engine, and provides for aircrew determination of the fuel remaining. This includes a system level diagram showing the location of the system in the UA and the fuel flow path; and
(10) How the fuel system is designed in terms of safety (fire detection and extinguishing, reduction of risk in case of impact, leak prevention, etc.).
(c) Electric-powered propulsion systems
(1) A high-level description of the electrical distribution architecture, including items such as regulators, switches, buses, and converters, as necessary;
(2) The type of motor that is used;
(3) The number of motors that are installed;
(4) The maximum continuous power output of the motor in watts;
(5) The maximum peak power output of the motor in watts;
(6) The current range of the motor in amps;
(7) Whether the propulsion system has a separate electrical source, and if not, how the power is managed with respect to the other systems of the UA;
(8) A description of the electrical system and how it distributes adequate power to meet the requirements of the receiving systems. This should include a system level diagram showing the electrical power distribution throughout the UA;
(9) How power is generated on board the UA (for example, generators, alternators, batteries).
(10) If a limited life power source such as batteries is used, the useful life of the power source during normal and emergency conditions, and how this was determined;
(11) How information on the battery status and the remaining battery capacity is provided to the remote pilot or the watchdog system;
(12) If available, a description of the source(s) of backup power for use in the event of a loss of the primary power source. This should include:
(i) the systems that are powered during backup power operation;
(ii) a description of any automatic or manual load shedding; and
(iii) how much operational time the backup power source provides, including the assumptions used to make this determination;
(13) How the performance of the propulsion system is monitored;
(14) The status indicators and alert (such as warning, caution and advisory) messages that are provided to the remote pilot;
(15) A description of the most critical propulsion-related failure modes/conditions and their impact on system operation;
(16) How the UA responds, and the safeguards that are in place to mitigate the risk of a propulsion system loss for each of the following:
(i) Low battery charge;
(ii) A failed signal input from the RPS; and
(iii) A motor controller failure;
(17) If the motor has in-flight reset capabilities, a description of the manual and/or automatic features of this capability.
A description of these systems to a level of detail equivalent to the fuel and electrical propulsions sections above.
A.2.2.1.4 Flight control surfaces and actuators
This section should include the following:
(a) A description of the design and operation of the flight control surfaces and servos/actuators, including a diagram showing the location of the control surfaces and the servos/actuators;
(b) A description of any potential failure modes and the corresponding mitigations;
(c) How the system responds to a servo/actuator failure; and
(d) How the remote-pilot or watchdog system is alerted of a servo/actuator malfunction.
This section should describe the non-payload sensor equipment on board the UA and its role.
This section should describe the payload equipment on board the UA, including all the payload configurations that significantly change the weight and balance, electrical loads, or flight dynamics.
This section should include the following:
An overall system architecture diagram of the avionics architecture, including the location of all air data sensors, antennas, radios, and navigation equipment. A description of any redundant systems, if available.
(a) How the UAS determines its location;
(b) How the UAS navigates to its intended destination;
(c) How the remote pilot responds to instructions from:
(1) air traffic control;
(2) UA observers or VOs (if applicable); and
(3) other crew members (if applicable);
(d) The procedures to test the altimeter navigation system (position, altitude);
(e) How the system identifies and responds to a loss of the primary means of navigation;
(f) A description of any backup means of navigation; and
(g) How the system responds to a loss of the secondary means of navigation, if available.
(a) How the autopilot system was developed, and the industry or regulatory standards that were used in the development process.
(b) If the autopilot is a commercial off-the-shelf (COTS) product, the type/design and the production organisation, with the criteria that were used in selecting the COTS autopilot.
(c) The procedures used to install the autopilot and how its correct installation is verified, with references to any documents or procedures provided by the manufacturer’s organisation and/or developed by the UAS operator’s organisation.
(d) If the autopilot employs input limit parameters to keep the aircraft within defined limits (structural, performance, flight envelope, etc.), a list of those limits and a description of how these limits were defined and validated.
(e) The type of testing and validation that was performed (software-in-the-loop (SITL) and hardware-in-the-loop (HITL) simulations).
(a) How the control surfaces (if any) respond to commands from the flight control computer/autopilot.
(b) A description of the flight modes (i.e. manual, artificial-stability, automatic, autonomous).
(c) Flight control computer/autopilot:
(1) If there are any auxiliary controls, how the flight control computer interfaces with the auxiliary controls, and how they are protected against unintended activation.
(2) A description of the flight control computer interfaces required to determine the flight status and to issue appropriate commands.
(3) The operating system on which the flight controls are based.
A.2.3.5 Remote pilot station (RPS)
(a) A description or a diagram of the RPS configuration, including screen captures of the control station displays.
(b) How accurately the remote pilot can determine the attitude, altitude (or height) and position of the UA.
(c) The accuracy of the transmission of critical parameters to other airspace users/air traffic control (ATC).
(d) The critical commands that are safeguarded from inadvertent activation and how that is achieved (for example, is there a two-step process to command ‘switch the engine off’). The kinds of inadvertent input that the remote pilot could enter to cause an undesirable outcome (for example, accidentally hitting the ‘kill engine’ control in flight).
(e) Any other programmes that run concurrently on the ground control computer, and if there are any, the precautionary measures that are used to ensure that flight‑critical processing will not be adversely affected.
(f) The provisions that are made against an RPS display or interface lock‑up.
(g) The alerts (such as warning, caution and advisory) that the system provides to the remote pilot (e.g. low fuel or battery level, failure of critical systems, or operation out of control).
(h) A description of the means to provide power to the RPS, and redundancies, if any.
A.2.3.6 Detect and avoid (DAA) system
(a) Aircraft conflict avoidance
(1) A description of the system/equipment that is installed for collaborative conflict avoidance (e.g. SSR, TCAS, ADS-B, FLARM, etc.).
(2) If the equipment is qualified, details of the detailed qualification to the respective standard.
(3) If the equipment is not qualified, the criteria that were used in selecting the system.
(b) Non-collaborative conflict avoidance:
A description of the equipment that is installed (e.g. vision-based, PSR data, LIDAR, etc.).
(c) Obstacle conflict avoidance
A description of the system/equipment that is installed, if any, for obstacle collision avoidance.
(d) Avoidance of adverse weather conditions
A description of the system/equipment that is installed, if any, for the avoidance of adverse weather conditions.
(e) Standard
(1) If the equipment is qualified, a list of the detailed qualification to the respective standard.
(2) If the equipment is not qualified, the criteria that were used in selecting the system.
(f) A description of any interface between the conflict avoidance system and the flight control computer.
(g) A description of the principles that govern the installed DAA system
(h) A description of the role of the remote pilot or any other remote crew in the DAA system.
(i) A description of the known limitations of the DAA system.
A.2.4 Containment system
(a) A description of the principles of the system/equipment used to perform containment functions for:
(1) avoidance of specific area(s) or volume(s); or
(2) confinement in a given area or volume.
(b) The system information and, if applicable, supporting evidence that demonstrates the reliability of the containment system.
A.2.5 Ground support equipment (GSE) segment
(a) A description of all the support equipment that is used on the ground, such as launch or recovery systems, generators, and power supplies.
(b) A description of the standard equipment available, and the backup or emergency equipment.
(c) A description of how the UAS is transported on the ground.
A.2.6 Command and control (C2) link segment
(a) The standard(s) with which the system is compliant.
(b) A detailed diagram that shows the system architecture of the C2 link, including informational or data flows and the performance of the subsystem, and values for the data rates and latencies, if known.
(c) A description of the control link(s) connecting the UA to the RPS and any other ground systems or infrastructures, if applicable, specifically addressing the following items:
(1) The spectrum that will be used for the control link and how the use of this spectrum has been coordinated. If approval of the spectrum is not required, the regulation that was used to authorise the frequency.
(2) The type of signal processing and/or link security (i.e. encryption) that is employed.
(3) The datalink margin in terms of the overall link bandwidth at the maximum anticipated distance from the RPS, and how it was determined.
(4) If there is a radio signal strength and/or health indicator or similar display to the remote pilot, how the signal strength and health values were determined, and the threshold values that represent a critically degraded signal.
(5) If the system employs redundant and/or independent control links, how different the design is, and the likely common failure modes.
(6) For satellite links, an estimate of the latencies associated with using the satellite link for aircraft control and for air traffic control communications.
(7) The design characteristics that prevent or mitigate the loss of the datalink due to the following:
(i) RF or other interference;
(ii) flight beyond the communications range;
(iii) antenna masking (during turns and/or at high attitude angles);
(iv) a loss of functionality of the RPS;
(v) a loss of functionality of the UA; and
(vi) atmospheric attenuation, including precipitation.
A description of the system functions in case of a C2 link degradation:
(a) Whether the C2 link degradation status is available and in what form (e.g. degraded, critical, automatic messages).
(b) How the status of the C2 link degradation is announced to the remote pilot (e.g. visual, haptic, or sound).
A description of the associated contingency procedures.
(c) Other.
(a) The conditions that could lead to a loss of the C2 link.
(b) The measures in case of a loss of the C2 link.
(c) A description of the clear and distinct aural and visual alerts to the remote pilot for any case of a lost link.
(d) A description of the established lost link strategy presented in the UAS operating manual, taking into account the emergency recovery capability.
(e) A description of how the geo-awareness or geo-fencing system is used in this case, if available.
(f) The lost link strategy, and, if incorporated, the re-acquisition process in order to try to re-establish the link in a reasonably short time.
(a) A description of the single failure modes and their recovery mode(s), if any.
(b) A description of the emergency recovery capability to prevent risks to third-parties. This typically consists of:
(1) a flight termination system (FTS), procedure or function that aims to immediately end the flight; or
(2) an automatic recovery system (ARS) that is implemented through UAS crew command or by the on board systems. This may include an automatic pre‑programmed course of action to reach a predefined and unpopulated forced landing area; or
(3) any combination of the above, or other methods.
(c) The applicant should provide both a functional and physical diagram of the global UA system with a clear depiction of its constituent components, and, where applicable, an indication of its peculiar features (e.g. independent power supplies, redundancies, etc.)
INTEGRITY AND ASSURANCE LEVELS FOR THE MITIGATIONS USED TO REDUCE THE INTRINSIC GROUND RISK CLASS (GRC)
The following Table B-1 provides the basic principles to consider when using SORA Annex B.
|
|
Principle description |
Additional information |
|
#1 |
Annex B provides assessment criteria for the integrity (i.e. safety gain) and assurance (i.e. method of proof) of the applicant’s proposed mitigations. The proposed mitigations are intended to reduce the intrinsic ground risk class (GRC) associated with a given operation. |
The identification of mitigations is the responsibility of the applicant. |
|
#2 |
Annex B does not cover the LoI of the competent authority. The Lol is based on the competent authority’s assessment of the applicant’s ability to perform the given operation. |
|
|
#3 |
A proposed mitigation may or may not have a positive effect in reducing the ground risk associated with a given operation. In the case where a mitigation is available but does not reduce the risk on the ground, its level of integrity should be considered equivalent to ‘None’. |
|
|
#4 |
To achieve a given level of integrity/assurance, when more than one criterion exists for that level of integrity/assurance, all the applicable criteria need to be met. |
|
|
#5 |
Annex B intentionally uses non-prescriptive terms (e.g. suitable, reasonably practicable) to provide flexibility to both the applicant and the competent authorities. This does not constrain the applicant in proposing mitigations, nor the competent authority in evaluating what is needed on a case-by-case basis. |
|
|
#6 |
This annex in its entirety also applies to single-person organisations. |
|
Table B.1 – Basic principles
B.2 M1 — Strategic mitigations for ground risk
M1 mitigations are ‘strategic mitigations’ intended to reduce the number of people at risk on the ground. To assess the integrity levels of M1 mitigations, the following need to be considered:
(a) the definition of the ground risk buffer and the resulting ground footprint; and
(b) the evaluation of the people at risk.
With the exception of the specific case of a ‘tether’ provided in the following paragraph (2), the generic criteria to assess the level of integrity (Table B.2) and level of assurance (Table B.3) of the M1 type ground risk mitigations are provided in following paragraph (1).
|
|
Level of integrity |
|||
|
Low |
Medium |
High |
||
|
M1 — Strategic mitigations for ground risk |
Criterion #1 (Definition of the ground risk buffer) |
A ground risk buffer with at least a 1:1 rule1 or for rotary wing UA defined using a ballistic methodology approach acceptable to the competent authority. |
The ground risk buffer takes into consideration: (a) improbable2 single malfunctions or failures (including the projection of high energy parts such as rotors and propellers) which would lead to an operation outside the operational volume; (b) meteorological conditions (e.g. wind); (c) UAS latencies (e.g. latencies that affect the timely manoeuvrability of the UA); (d) UA behaviour when activating a technical containment measure; and (e) UA performance. |
Same as medium3 |
|
Comments |
1 If the UA is planned to operate at an altitude of 150 m, the ground risk buffer should be a minimum of 150 m. |
2 For the purpose of this assessment, the term ‘improbable’ should be interpreted in a qualitative way as ‘Unlikely to occur in each UAS during its total life, but which may occur several times when considering the total operational life of a number of UAS of this type’. 3 The distinction between a medium and a high level of robustness for this criterion is achieved through the level of assurance (Table 3 below). |
||
|
Criterion #2 (Evaluation of people at risk) |
The applicant evaluates the area of operations by means of on-site inspections or appropriate appraisals to justify lowering the density of the people at risk (e.g. a residential area during daytime when some people may not be present or an industrial area at night time for the same reason). |
The applicant evaluates the area of operations by use of authoritative density data (e.g. data from the U‑space data service provider) relevant for the proposed area and time of operation to substantiate a lower density of people at risk. If the applicant claims a reduction, due to a sheltered operational environment, the applicant: (a) uses a UA of less than 25 kg and not flying above 174 knots4, and (b) demonstrates that although the operation is conducted in a populated environment, it is reasonable to consider that most of the non-involved persons will be located within a building5. |
Same as medium. |
|
|
Comments |
N/A |
4 as per MITRE presentation given during the UAS Technical Analysis and Applications Center (TAAC) conference in 2016 titled ‘UAS EXCOM Science and Research Panel (SARP) 2016 TAAC Update’ - PR 16‑3979 5 The consideration of this mitigation may vary based on the local conditions. |
N/A |
|
Table B.2 — Level of integrity assessment criteria for ground risk of non-tethered M1 mitigations
|
|
Level of assurance |
|||
|
Low |
Medium |
High |
||
|
M1 — Strategic mitigations for ground risk |
Criterion #1 (Definition of the ground risk buffer) |
The applicant declares that the required level of integrity is achieved1. |
The applicant has supporting evidence to claim that the required level of integrity has been achieved. This is typically done by means of testing, analysis, simulation2, inspection, design review or through operational experience. |
The claimed level of integrity is validated by the competent authority of the MS or by an entity that is designated by the competent authority. |
|
Comments |
1 Supporting evidence may or may not be available. |
2 When simulation is used, the validity of the targeted environment used in the simulation needs to be justified. |
N/A |
|
|
Criterion #2 (Evaluation of people at risk) |
The applicant declares that the required level of integrity has been achieved3. |
The density data used for the claim of risk reduction is an average density map for the date/time of the operation from a static sourcing (e.g. census data for night time ops). In addition, for localised operations (e.g. intra-city delivery or infrastructure inspection), the applicant submits the proposed route/area of operation to the applicable authority (e.g. city police, office of civil protection, infrastructure owner etc.) to verify the claim of a reduced number of people at risk. |
Same as medium; however, the density data used for the claim of risk reduction is a near-real time density map from a dynamic sourcing (e.g. cellular user data) and applicable for the date/time of the operation. |
|
|
Comments |
3 Supporting evidence may or may not be available |
N/A |
N/A |
|
Table B.3 — Level of assurance assessment criteria for ground risk of non-tethered M1 mitigations
(2) Specific criteria in case of use of a tether to reduce people at risk
When an applicant wants to take credit for a tether to justify a reduction in the number of people at risk:
(a) the tether needs to be considered part of the UAS and assessed based on the criteria below, and
(b) potential hazards created by the tether itself should be addressed through the OSOs defined in Annex E.
The level of integrity criteria for a tethered mitigation is found in Table B.4. The level of assurance for a tethered mitigation is found in Table B.5.
|
|
Level of integrity |
|||
|
Low |
Medium |
High |
||
|
M1 — Tethered operation |
Criterion #1 (Technical design) |
Does not meet the ‘medium’ level criteria |
(a) The length of the line is adequate to contain the UA in the operational volume and reduce the number of people at risk. (b) The strength of the line is compatible with the ultimate loads1 expected during the operation. (c) The strength of the attachment points is compatible with the ultimate loads1 expected during the operation. (d) The tether cannot be cut by the rotating propellers. |
Same as medium2 |
|
Comments |
N/A |
1 Ultimate loads are identified as the maximum loads to be expected in service, including all the possible nominal and failure scenarios multiplied by a 1.5 safety factor. 2 The distinction between a medium and a high level of robustness for this criterion is achieved through the level of assurance (Table B.5 below). |
||
|
Criterion #2 (Procedures) |
Does not meet the ‘medium’ level criteria |
The applicant has procedures to install and periodically inspect the condition of the tether. |
Same as medium3 |
|
|
Comments |
N/A |
3 The distinction between a medium and a high level of robustness for this criterion is achieved through the level of assurance (Table B.5 below). |
||
Table B.4 — Level of integrity assessment criteria for ground risk tethered M1 mitigations
|
|
Level of assurance |
|||
|
Low |
Medium |
High |
||
|
M1 — Tethered operation |
Criterion #1 (Technical design) |
Does not meet the ‘medium’ level criteria |
The applicant has supporting evidence (including the specifications of the tether material) to claim that the required level of integrity is achieved. (a) This is typically achieved through testing or operational experience. (b) Tests can be based on simulations; however, the validity of the target environment used in the simulation needs to be justified. |
The claimed level of integrity is validated by the competent authority of the MS or by an entity that is designated by the competent authority. |
|
Comments |
N/A |
N/A |
N/A |
|
|
Criterion #2 (Procedures) |
(a) Procedures do not require validation against either a standard or a means of compliance considered adequate by the competent authority of the MS. (b) The adequacy of the procedures and checklists is declared. |
(a) Procedures are validated against standards considered adequate by the competent authority of the MS and/or in accordance with the means of compliance acceptable to that authority1. (b) The adequacy of the procedures is proven through: (1) dedicated flight tests; or (2) simulation, provided that the representativeness of the simulation means is proven to be valid for the intended purpose with positive results; or (3) any other means acceptable to the competent authority of the MS. |
Same as medium. In addition: (a) Flight tests performed to validate the procedures cover the complete flight envelope or are proven to be conservative. (b) The procedures, flight tests and simulations are validated by the competent authority of the MS or by an entity that is designated by the competent authority. |
|
|
Comments |
N/A |
1 AMC2 UAS.SPEC.030(3)(e) (Operational procedures for medium and high levels of robustness) is considered an acceptable means of compliance. |
N/A |
|
Table B.5 — Level of assurance assessment criteria for ground risk tethered M1 mitigations
B.3 M2 — Effects of ground impact are reduced
M2 mitigations are intended to reduce the effect of ground impact once the control of the operation is lost. This is done by reducing the effect of the UA impact dynamics (i.e. the area, energy, impulse, transfer energy, etc.). One example would be the use of a parachute.
|
|
Level of integrity |
|||
|
Low/None |
Medium |
High |
||
|
M2 — Effects of UA impact dynamics are reduced (e.g. parachute) |
Criterion #1 (Technical design) |
Does not meet the ‘medium’ level criterion |
(a) Effects of impact dynamics and post impact hazards1 are significantly reduced although it can be assumed that a fatality may still occur. (b) When applicable, in case of malfunctions, failures or any combinations thereof that may lead to a crash, the UAS contains all the elements required for the activation of the mitigation. (c) When applicable, any failure or malfunction of the proposed mitigation itself (e.g. inadvertent activation) does not adversely affect the safety of the operation. |
Same as medium. In addition:
(a) When applicable, the activation of the mitigation is automated2. (b) The effects of impact dynamics and post impact hazards are reduced to a level where it can be reasonably assumed that a fatality will not occur3. |
|
Comments |
N/A |
1 Examples of post impact hazards include fires and the release of high-energy parts. |
2 The applicant retains the discretion to implement an additional manual activation function. 3 Emerging research and upcoming industry standards will help applicants to substantiate compliance with this integrity criterion. |
|
|
Criterion #2 (Procedures, if applicable) |
Any equipment used to reduce the effect of the UA impact dynamics is installed and maintained in accordance with the manufacturer’s instructions.4 |
|||
|
Comments / Notes |
4 The distinction between a low, a medium and a high level of robustness for this criterion is achieved through the level of assurance (Table B.7 below). |
|||
|
Criterion #3 (Training, if applicable) |
Personnel responsible for the installation and maintenance of the measures proposed to reduce the effect of the UA impact dynamics are identified and trained by the applicant.5 |
|||
|
Comments / Notes |
5 The distinction between a low, a medium and a high level of robustness for this criterion is achieved through the level of assurance (Table B.7 below). |
|||
Table B.6 — Level of integrity assessment criteria for M2 mitigations
|
M2 — Effects of UA impact dynamics are reduced (e.g. parachute) |
|
Level of assurance |
||
|
Low/None |
Medium |
High |
||
|
Criterion #1 (Technical design) |
The applicant declares that the required level of integrity has been achieved1. |
The applicant has supporting evidence to claim that the required level of integrity is achieved. This is typically2 done by means of testing, analysis, simulation3, inspection, design review or through operational experience. The applicant may declare compliance with MoC to Light-UAS.25124 providing the supporting evidence defined in it. |
The competent authority should request the applicant to use a UAS for which EASA has verified the claimed integrity through a DVR. |
|
|
Comments |
1 Supporting evidence may or may not be available. |
2 The use of industry standards is encouraged when developing mitigations used to reduce the effect of ground impact. 3 When simulation is used, the validity of the targeted environment used in the simulation needs to be justified. |
|
|
|
Criterion #2 (Procedures, if applicable) |
(a) Procedures do not require validation against either a standard or a means of compliance considered adequate by the competent authority of the MS. (b) The adequacy of the procedures and checklists is declared. |
(a) Procedures are validated against standards considered adequate by the competent authority of the MS and/or in accordance with the means of compliance acceptable to that authority1. (b) The adequacy of the procedures is proven through: (1) dedicated flight tests; or (2) simulation, provided that the representativeness of the simulation means is proven to be valid for the intended purpose with positive results; or (3) any other means acceptable to the competent authority of the MS |
Same as medium. In addition: (a) Flight tests performed to validate the procedures cover the complete flight envelope or are proven to be conservative. (b) The procedures, flight tests and simulations are validated by the competent authority of the MS or by an entity that is designated by the competent authority. |
|
|
Comments |
N/A |
1 AMC2 UAS.SPEC.030(3)(e) (Operational procedures for medium and high levels of robustness) is considered an acceptable means of compliance. |
N/A |
|
|
Criterion #3 (Training, if applicable) |
Training is self-declared (with evidence available) |
(a) Training syllabus is available. (b) The UAS operator provides competency‑based, theoretical and practical training. |
(a) Training syllabus is validated by the competent authority of the MS or by an entity that is designated by the competent authority. (b) Remote crew competencies are verified by the competent authority of the MS or by an entity that is designated by the competent authority. |
|
|
Comments |
N/A |
N/A |
N/A |
|
Table B.7 — Level of assurance assessment criteria for M2 mitigations
B.4 M3 — An ERP is in place, UAS operator validated and effective
An ERP should be defined by the applicant in the event of a loss of control of the operation (*). These are emergency situations where the operation is in an unrecoverable state and in which:
(a) the outcome of the situation relies highly on providence; or
(b) it could not be handled by a contingency procedure; or
(c) when there is a grave and imminent danger of fatalities.
The ERP proposed by an applicant is different from the emergency procedures. The ERP is expected to cover:
(1) a plan to limit the escalating effect of a crash (e.g. to notify first responders), and
(2) the conditions to alert ATM.
(*) Refer to the SORA semantic model (Figure 1) in the main body.
|
|
Level of integrity |
|||
|
Low/None |
Medium |
High |
||
|
M3 — An ERP is in place, UAS operator validated and effective |
Criteria |
No ERP is available, or the ERP does not cover the elements identified to meet a ‘medium’ or ‘high’ level of integrity |
The ERP: (a) is suitable for the situation; (b) limits the escalating effects; (c) defines criteria to identify an emergency situation; (d) is practical to use; (e) clearly delineates the duties of remote crew member(s). |
Same as medium. In addition, in case of a loss of control of the operation, the ERP is shown to significantly reduce the number of people at risk, although it can be assumed that a fatality may still occur. |
|
Comments |
N/A |
N/A |
N/A |
|
Table B.8 — Level of integrity assessment criteria for M3 mitigations
|
|
Level of assurance |
|||
|
Low/None |
Medium |
High |
||
|
M3 — An ERP is in place, UAS operator validated and effective |
Criterion #1 (Procedures) |
(a) Procedures do not require validation against either a standard or a means of compliance considered adequate by the competent authority of the MS. (b) The adequacy of the procedures and checklists is declared. |
(a) The ERP is developed to standards considered adequate by the competent authority of the MS and/or in accordance with means of compliance acceptable to that authority1. (b) The ERP is validated through a representative tabletop exercise2 consistent with the ERP training syllabus. |
Same as medium. In addition: (a) The ERP and the effectiveness of the plan with respect to limiting the number of people at risk are validated by the competent authority of the MS or by an entity that is designated by the competent authority. (b) The applicant has coordinated and agreed the ERP with all third parties identified in the plan. (c) The representativeness of the tabletop exercise is validated by the competent authority of the MS or by an entity that is designated by the competent authority. |
|
Comments |
N/A |
1 AMC3 UAS.SPEC.030(3)(e) (ERP for medium and high level of robustness) is considered an acceptable means of compliance. 2 The tabletop exercise may or may not involve all third parties identified in the ERP. |
N/A |
|
|
Criterion #2 (Training) |
Does not meet the ‘medium’ level criterion |
(a) An ERP training syllabus is available. (b) A record of the ERP training completed by the relevant staff is established and kept up to date. |
Same as medium. In addition, the competencies of the relevant staff are verified by the competent authority of the MS or by an entity that is designated by the competent authority. |
|
|
Comments |
N/A |
N/A |
N/A |
|
Table B.9 — Level of assurance assessment criteria for M3 mitigations
STRATEGIC MITIGATION — COLLISION RISK ASSESSMENT
C.1 Introduction — air risk strategic mitigations
The target audience for Annex C is the UAS operator who wishes to demonstrate to the competent authority that the risk of a mid-air collision in the operational volume is acceptably safe, and to obtain, with concurrence from the ANSP, approval to operate in the particular airspace.
More particularly, this Annex C covers the process of how the UAS operator justifies lowering the initial assessment of the ARC.
The air risk model provides a holistic means to assess the risk of an encounter with manned aircraft. This provides guidance to both the UAS operator and the competent authority on determining whether an operation can be conducted in a safe manner. The model does not provide answers to all the air risk challenges, and should not be used as a checklist. This guidance provides the UAS operator with suitable mitigation means and thereby reduces the air risk to an acceptable level. This guidance does not contain prescriptive requirements, but rather a set of objectives at various levels of robustness.
C.3 Air risk scope and assumptions
The scope of this air risk assessment is designed to help the UAS operator and the competent authority in determining the risk of a collision with manned aircraft which are operated under the ‘specific’ category. The scope of the air risk assessment does not include:
(a) the probability of UAS on UAS encounters; or
(b) risks due to wake turbulence, adverse weather, controlled flight into terrain, return-to-course functions, a lost link, or an automatic response.
C.3.1 SORA qualitative vs quantitative approach
This air risk assessment is qualitative in nature. Where possible, this assessment will use quantitative data to back up and support the qualitative assumptions. The SORA approach in general provides a balance between qualitative and quantitative approaches, as well as between known prescriptive and non-traditional methodologies.
C.3.2 SORA U-space assumptions
The SORA has used U-space mitigations to a limited extent, because U-space is in the early stages of development. When U-space provides adequate mitigations to limit the risk of UAS encounters with manned aircraft, a UAS operator can apply for, and obtain credit for these mitigations, whether they are tactical or strategic.
C.3.3 SORA flight rules assumptions
Today, UAS flight operations under the ‘specific’ category cannot fully comply with the IFR and VFR rules as written. Although IFR infrastructures and mitigations are designed for manned aircraft operations (e.g. minimal safe altitudes, equipage requirements, operational restrictions, etc.), it may be possible for a UAS to comply with the IFR requirements. UAS operating at very low levels (e.g. operational volume’s ceiling below 150m (~500 ft) AGL) may technically comply with the IFR requirements, but the IFR infrastructure was not designed with that airspace in mind; therefore, mitigations for this airspace would be derived, and would be highly impractical and inefficient. When operating BVLOS, a UAS cannot comply with VFR34 A UAS operating under VLOS may be able to comply with VFR..
Given the above, for the purposes of this risk assessment, it is assumed that the competent authority will address these shortcomings. All aircraft must adhere to specific flight rules to mitigate the collision risk, in accordance with Regulation (EU) No 923/201235 Commission Regulation (EU) No 923/2012 laying down the common rules of the air and operational provisions regarding services and procedures in air navigation and amending Implementing Regulation (EU) No 1035/2011 and Regulations (EC) No 1265/2007, (EC) No 1794/2006, (EC) No 730/2006, (EC) No 1033/2006 and (EU) No 255/2010, OJ L 281, 13.10.2012, p.1. (the standardised European rules of the air (SERA) Regulation). The implementation of procedures and guidelines appropriate to the airspace structure reduces the collision risk for all aircraft. For instance, there are equipment requirements established for the airspace requested and requirements associated with day-night operations, pilot training, airworthiness, lighting requirements, altimetry requirements, airspace restrictions, altitude restrictions, etc. These rules must still be addressed by the competent authority.
The Member State is responsible for defining the airspace structures in accordance with Regulation (EU) 2017/373; in addition, as required in Article 15 of the UAS Regulation, the Member State will define the geographical zones for UAS operators. The Member State, when defining the airspace structure, considers the traffic type and complexity and defines the airspace classes and services being provided in accordance with the SERA. This information, which can be published either in the aeronautical information publication (AIP) or any other aeronautical publication, can be used by the UAS operator to identify the initial air risk. The SORA air risk model is a tool to assess the risks associated with UAS operations in a particular volume of airspace, and a method to determine whether those risks are within acceptable safety limits.
C.3.4 Regulatory requirements, safety requirements, and waivers
The SERA Regulation requires all aircraft, manned and UAS, to ‘remain well clear from and avoid collisions with’ other manned aircraft. The UAS is unable to ‘see and avoid’, therefore, it must employ an alternate means of compliance to meet the intent of ‘see and avoid’, which will have to be defined in terms of safety and performance for the UAS operation. When the risk of an encounter with manned aircraft is extremely low (i.e. in atypical/segregated airspace), an alternate means of compliance may not be required. For example, in areas where the manned airspace density is so low, (e.g. in the case of low-level operations in remote parts of Alaska or northern Sweden), the airspace safety threshold could be met with no additional mitigation. UAS operators need to understand that although the airspace may be technically safe to fly in from an air collision risk standpoint, it does not fulfil point SERA.3201 of the SERA Regulation, or the ICAO Annex 2, Section 3.2 ’See and Avoid’ requirements.
To operate a UAS in manned airspace, two requirements must be met:
(a) A safety requirement that ensures that the operation is safe to conduct in the operational volume; and
(b) A requirement for compliance with point SERA.3201 of the SERA Regulation to ‘see and avoid’.
These requirements must be addressed to the competent authority through either:
(1) demonstration of compliance with both requirements;
(2) demonstration of an alternate means of compliance with the requirements; or
(3) a waiver of the requirement(s) by the competent authority.
The SORA provides a means to assess whether the air risks associated with UAS operations is within acceptable limits.
C.3.5 SORA assumptions on threat aircraft
This air risk assessment does not consider the ability of the threat aircraft to remain well clear from or to avoid collisions with the UAS in any part of the safety assessment.
C.3.6 SORA assumptions on people-carrying UAS
This air risk model does not consider the notion of UAS carrying people, or urban mobility operations. The model and the assessment criteria are limited to the risk of an encounter with manned aircraft, i.e. an aircraft piloted by a human on board.
C.3.7 SORA assumptions on UAS lethality
This air risk assessment assumes that a mid-air collision between a UAS and manned aircraft is catastrophic. Frangibility is not considered.
C.3.8 SORA assertion on tactical mitigations
The SORA model makes no distinction between separation provision and collision avoidance but treats them as one dependent system performing a continuous function, whose goals and objectives change over time. This continuum starts with an encounter and progresses to a near mid-air collision objective as the pilot and/or the detect and avoid system of the UA negotiate(s) the encounter. The use of the term ‘tactical mitigation’ should therefore not be confused with the provisioning of (tactical) separation services referred to in ICAO Doc 9854.
C.4 General air-SORA mitigation overview
SORA classification of mitigations
The SORA classifies mitigations to suit the operational needs of a UAS in the ‘specific’ class. These mitigations are classified as:
(a) strategic mitigations by the application of operational restrictions;
(b) strategic mitigations by the application of common structures and rules; and
(c) tactical mitigations.
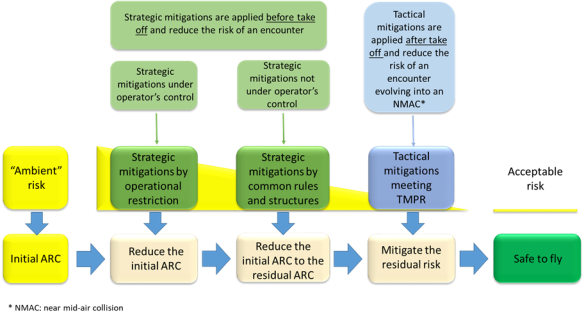
Figure C.5 — SORA air conflict mitigation process
C.5 Air risk strategic mitigation
Strategic mitigations are further divided into:
(a) mitigations by operational restrictions which are mitigations that are controlled36 The usage of the word ‘controlled’ means that the UAS operator is not reliant on the cooperation of other airspace users to implement an effective operational restriction mitigation strategy. by the UAS operator; and
(b) mitigations by common structures37 This usage of the word ‘structure’ means air structure, airways, traffic procedures and the like. and rules which are mitigations which cannot be controlled by the UAS operator.
C.5.1 Strategic mitigation by operational restrictions
Operational restrictions are controlled by the UAS operator and are intended to mitigate the risk of a collision prior to take-off. This section provides details on operational restrictions, and examples of how these can be applied to UAS operations.
Operational restrictions are the primary means that a UAS operator can apply to reduce the risk of collision using strategic mitigation(s). The most common mitigations by operational restriction are:
(a) mitigation(s) that bound the geographical volume in which the UAS operates (e.g. certain boundaries or airspace volumes); and
(b) mitigation(s) that bound the operational time frame (e.g. restricted to certain times of day, such as flying only at night).
In addition to the above, another approach to limit exposure to risk is to limit the exposure time. This is called ‘mitigation by exposure’. Mitigation by exposure simply limits the time of exposure to the operational risk.
Mitigations that limit the flight time or the exposure time to risk may be more difficult to apply. With this said, there is some precedence for this mitigation, which has (in some cases) been accepted by the competent authority. Therefore, even though it is considered to be difficult, this mitigation strategy may be considered.
One example is the minimum equipment list (MEL) system, which allows, in certain situations, a commercial airline to fly for three to ten days with an inoperative traffic collision avoidance system (TCAS). The safety argument is that three days is a very short exposure time compared with the total life-time risk exposure of the aircraft. This short time of elevated risk exposure is justified to allow the aircraft to return to a location where proper equipment maintenance can take place. While appreciating that this may be a difficult argument for the UAS operation to make, the UAS operator is still free to pursue this line of reasoning for a reduction in the risk of collision by applying a time of exposure argument.
C.5.1.1. Example of operational restriction by geographical boundary
The UAS operator intends to fly in a Class B airport airspace. The Class B airspace, as a whole, has a very high encounter rate. However, the UAS operator wishes to operate at a very low altitude and at the very outer reaches of the Class B airspace where manned aircraft do not routinely fly. The UAS operator draws up a new operational volume at the outer edge of the class B airspace and demonstrates that operations within the new Class B volume have very low encounter rates.
The UAS operator may approach this scenario by requesting the competent authority to more precisely define the airport environment from the SORA perspective. The UAS operator then considers the newly defined airport environment, and provides an operational restriction that allows the UAS operation to safely remain inside the class B airspace, but outside the newly defined SORA airport environment.
C.5.1.2 Example of operational restriction by time limitations
The UAS operator wishes to fly in a Class B airport airspace. The Class B airspace, as a whole, has a very high encounter rate. However, the UAS operator wishes to operate at a time of day when manned aircraft do not routinely fly. The UAS operator then restricts the time schedule of the UAS operation and demonstrates that the new time (e.g. 03:00 / 3 AM and still within Class B) has very low encounter rates and is safe for operation.
C.5.1.3 Example of operational restriction by time of exposure
The UAS operator wishes to cut the corner of a Class B airspace for flight efficiency. The UAS operator demonstrates that even though the Class B airspace has a high encounter rate, the UAS is only exposed to that higher rate for a very short amount of time as it transitions the corner.
C.5.2 Strategic mitigation by common structures38 This usage of the word ‘structure’ means air structure, airways, traffic procedures and the like. and rules
Strategic mitigation by common structures and rules requires all aircraft within a certain class of airspace to follow the same structures and rules; these structures and rules work to lower the risk of collision within the airspace. In accordance with the SERA Regulation, all aircraft in that airspace must participate, and only the competent authorities have the authority to set requirements for those aircraft, while the ANSP and ATCO provide instructions. The UAS operator does not have control39 The usage of the words ‘does not control’ means that the UAS operator does not have control over the implementation of aviation structures and rules and is reliant on the competent authority to implement structures and rules. over the existence or level of participation of the airspace structure or the application of the flight rules. Therefore, strategic mitigation by common structures and rules is applied by the competent authorities. These should be made available to the UAS operator through the geographical zones, defined in accordance with Article 15 of the UAS Regulation.
For example, imagine the situation if individual drivers could create their own driving rules to cover their direction, lanes, boundaries and speed. If the driving rules were different from one driver to another, no safety benefit would be gained, even though they were all following rules (their own), and total chaos would ensue. However, if all drivers were compelled to follow the same set of rules, then the traffic flow would be orderly, with increased safety for all drivers. This is why a UAS operator cannot propose a mitigation schema requiring participation from other airspace users that differs from that required by the competent authority.
Most strategic mitigations by common structures and rules will take the form of:
(a) common flight rules; and
(b) common airspace structures.
Strategic mitigations by common flight rules is accomplished by setting a common set of rules which all airspace users must comply with. These rules reduce air conflicts and/or make conflict resolution easier. Examples of common flight rules that reduce the collision risk include right of way rules, implicit and explicit coordination schemes, conspicuity requirements, cooperative identification system, etc.
Strategic mitigation by using a common airspace structure is accomplished by controlling the airspace infrastructure through physical characteristics, procedures, and techniques that reduce conflicts or make conflict resolution easier. Examples of common flight airspace structures which reduce the risk of collision are airways, departure and approach procedures, airflow management, etc.
In the future, as U-space structures and rules become more readily defined and adopted, they will provide a source for the strategic mitigation of UAS operations by common structures and rules that UAS operators could more easily apply.
C.5.2.1 Example of mitigation by common flight rules
The UAS operator intends to fly in a volume of airspace in which the competent authority requires all UAS to be equipped with an electronic cooperative system40 The installation of an electronic cooperative system would make the UAS a cooperative aircraft in accordance with FAA Interim Operational Approval Guidance 08-01, ’Unmanned Aircraft Systems Operations in the U.S. National Airspace System,’ Federal Aviation Administration, FAA/AIR-160, 2008. and anti-collision lighting. The rules further require the UAS operator to file a flight plan with the designated ANSP/U-space service providers, and check for potential hazards along the whole flight route. The operator complies with these requirements and installs anti-collision lights and a Mode-S Transponder. The operator further agrees to file a flight plan prior to each flight. These rules enhance the safety of the flight in the same way as a notice to airmen (NOTAM). The UAS operator should also have a system in place to check for high airspace usage in the intended operational volume (e.g. a glider competition or a fly-in). In those situations where the UAS operator does not own the airspace in which the operational volume exists, the rules require the UAS operator to request permission prior to entering that airspace.
C.5.2.2. Examples of mitigation by common airspace structure
Example 1: The competent authority establishes a transit corridor through Class B airspace that keeps the UAS separated from other non-UAS airport traffic, and safely separates the corridor traffic in one direction from the traffic in the other direction. The UAS operator intends to fly through this Class B airport airspace, and hence must stay within the established transit corridor and adhere to the transit corridor rules.
Example 2: The UAS operator intends to fly a UAS from one location to another, and files a flight plan with a U-space service provider or the procedural separation system. As the UAS takes off, the U-space service provider then guarantees separation by procedural control of all the aircraft in the airspace. Procedural controls are the take-off windows, reporting points, assigned airways and altitudes, route clearances, etc. required for safe operation.
C.6 Reducing the initial air risk class (ARC) assignment (optional)
This section is intended for an applicant that intends to use strategic mitigations to reduce the collision risk (i.e. ARC). There are two types of ARC:
(a) the initial ARC, which is a qualitative classification of a UAS operational collision risk within an operational volume before strategic mitigations are applied; and
(b) the residual ARC, which is a qualitative classification of a UAS operational collision risk in an operational volume after all strategic mitigations are applied.
If a UAS operator agrees that the (generalised) initial ARC applicable to their operation and operational volume is correct, then this step is not necessary, and the assessment should continue at SORA Step #6 (assigning the DAA tactical performance requirement and robustness levels based on the residual collision risk).
If mitigations to reduce the ARC are relevant and are proposed, this section provides information and examples of how to use strategic mitigation(s) to lower the collision risk within the operational volume, and demonstrate the strategy to a competent authority. The examples within the SORA may or may not be applicable or acceptable to the competent authority; however, the SORA encourages an open dialogue between the applicant and the competent authority to determine what is acceptable evidence.
C.6.1 Lowering the initial ARC to the residual ARC-a in any operational volume (optional)
ARC-a is intended for operations in atypical/segregated airspace (see Table C.1). Lowering the initial ARC to residual ARC-a requires a higher level of safety verification because it allows a UAS operator to operate without any tactical mitigation.
To demonstrate that an operation could be reduced to a residual ARC-a, the UAS operator should demonstrate:
(a) that the operational volume can meet the requirements of SORA atypical/segregated airspace; and
(b) compliance with any other requirements mandated by the competent authority for the intended operational volume.
A residual ARC-a assessment does necessarily exempt the UAS operator from the requirements to ‘see and avoid’ and to ‘remain well clear from’ other aircraft. If the designated competent authority allows the UAS operator a residual ARC-a assessment for the operational volume, in order to comply with the SERA Regulation, the UAS operator must either provide a valid means and equipment as an alternate means of compliance for the ‘see and avoid’ requirement, or the competent authority must waive the requirement to ‘see and avoid’ and ‘remain well clear.’
C.6.2 Lowering the initial ARC using operational restrictions (optional)
The SORA provides a two-step method to reduce the air risk by operational mitigation. The first step is to determine the initial ARC by using the potential air risk encounter rate based on known airspace densities (as per Table C.1). The second step is to reduce the initial risk through UAS operator-provided evidence that demonstrates that the intended operation is more indicative of another airspace volume and an encounter rate that corresponds to a lower risk classification (ARC); hence, reducing the initial ARC to a residual ARC (as per Table C.2). This requires the agreement of the competent authority before the ARC may be reduced.
The SORA used expertise from subject matter experts to rate the airspace encounter category (AEC) and the variables that influence the encounter rates (i.e. proximity, geometry, and dynamics). The variables are not interdependent, nor do they influence the encounter outcome in the same manner. A small increase in one encounter rate variable can have major effects on the collision risk; conversely, a small increase in another variable could have limited effect on the collision risk. Hence, lowering the aircraft density of an AEC airspace does not equate to a direct and equal lowering of the ARC risk level. There is no direct correlation between an individual AEC variable and the ARC collision risk levels. In summary:
(a) there are three inter-dependent variables that affect the ARC;
(b) the contribution of each variable to the total collision risk is not the same; and
(c) for simplicity, the SORA only allows the manipulation of one of the variables: the proximity, i.e. the aircraft density.
The first step to potentially lowering the ARC is to determine the AEC and the associated density rating using Table C.1. 12 operational/airspace environments were considered for the SORA air risk classification, and they correspond to the 12 scenarios found in Figure 4 of the SORA main body.
|
Operational environment, AEC and ARC |
|||
|
Operations in: |
Initial generalised density rating |
Corresponding AEC |
Initial ARC |
|
Airport/heliport environment |
|||
|
OPS in an airport/heliport environment in class B, C or D airspace |
5 |
AEC 1 |
ARC-d |
|
OPS in an airport/heliport environment in class E airspace or in class F or G |
3 |
AEC 6 |
ARC-c |
|
Operations above 150 m (~500 ft) AGL but below flight level 600 |
|||
|
OPS > 150 m (~500 ft) AGL but < FL 600 in a Mode-S Veil or transponder mandatory zone (TMZ) |
5 |
AEC 2 |
ARC-d |
|
OPS > 150 m (~500 ft) AGL but < FL 600 in controlled airspace |
5 |
AEC 3 |
ARC-d |
|
OPS > 150 m (~500 ft) AGL but < FL 600 in uncontrolled airspace over an urban area |
3 |
AEC 4 |
ARC-c |
|
OPS > 150 m (~500 ft) AGL but < FL 600 in uncontrolled airspace over a rural area |
2 |
AEC 5 |
ARC-c |
|
Operations below 150 m (~500 ft) AGL |
|||
|
OPS < 150 m (~500 ft) AGL in a Mode-S Veil or TMZ |
3 |
AEC 7 |
ARC-c |
|
OPS < 150 m (~500 ft) AGL in controlled airspace |
3 |
AEC 8 |
ARC-c |
|
OPS < 150 m (~500 ft) AGL in uncontrolled airspace over an urban area |
2 |
AEC 9 |
ARC-c |
|
OPS < 150 m (~500 ft) AGL in uncontrolled airspace over a rural area |
1 |
AEC 10 |
ARC-b |
|
Operations above flight level 600 |
|||
|
OPS > FL 600 |
1 |
AEC 11 |
ARC-b |
|
Operations in atypical or segregated airspace |
|||
|
OPS in atypical/segregated airspace |
1 |
AEC 12 |
ARC-a |
Table C.1 — Initial air risk class assessment
After determining the initial risk using Table C.1, an applicant may choose to reduce that risk using Table C.2. To understand Table C.2, the first column shows the AEC in the environment in which the UAS operator wishes to operate. Column A shows the associated airspace density rating for that AEC rated from 5 to 1, with 5 being very high density, and 1 being very low density.
Column B shows the corresponding initial ARC.
Column C is key to lowering the initial ARC. This column shows the relative density ratings that a UAS operator should demonstrate to the competent authority in order to argue and justify that the actual local air density rating of the operational area is lower than the rating associated with the initial AEC (Column A) in Table C.1. If this can be shown and accepted by the competent authority, then the new lower ARC level as shown in column D may be applicable.
As stated earlier, the UAS operator is responsible for collecting and analysing the airspace density and for demonstrating the effectiveness of their proposal for strategic mitigations by operational restrictions to the competent authority. In summary, the UAS operator should demonstrate that the restrictions imposed on the UAS operation can lower the risk of a collision by showing that the local airspace encounter rate, under the operational restrictions, is lower than the generalised AEC assessed encounter rate provided in Table C.1.
The strategic mitigation reduction case should be modelled after a safety case. The size and complexity of the strategic mitigation reduction depends entirely on what the UAS operator is trying to do, and where/when they want to do it. The strategic mitigation case as a safety case has two advantages. Firstly, it provides the UAS operator with a structured approach to describe and capture the operation, the hazards identified, the risk analysed, and the threat(s) mitigated. Secondly, it provides a safety case structure that a competent authority is familiar with, which, in turn, helps the competent authority to understand the UAS operator's intended operation and their reasoning as to why a reduction in the ARC can be safely justified.
As each authority is different, the SORA recommends the applicant to contact the competent authority and/or ANSP to determine the format and presentation of the strategic mitigation reduction case.
|
The density rating of manned aircraft, assessed on a scale of 1 to 5, with 1 representing a very low density and 5 representing a very high density. |
||||
|
Column |
A |
B |
C |
D |
|
AEC |
Initial generalised density rating for the environment |
Initial ARC |
If the local density can be demonstrated to be similar to: |
New lowered (residual) ARC |
|
AEC 1 or; AEC 2 |
5 |
ARC-d |
4 or 3 |
ARC-c |
|
2 or 1Note 1 |
ARC-b |
|||
|
AEC 3 |
4 |
ARC-d |
3 or 2 |
ARC-c |
|
1Note 1 |
ARC-b |
|||
|
AEC 4 |
3 |
ARC-c |
1Note 1 |
ARC-b |
|
AEC 5 |
2 |
ARC-c |
1Note 1 |
ARC-b |
|
AEC 6 or; AEC 7 or; AEC 8 |
3 |
ARC-c |
1Note 1 |
ARC-b |
|
AEC 9 |
2 |
ARC-c |
1Note 1 |
ARC-b |
|
Note 1: The reference environment for assessing density is AEC 10 (OPS < 400 ft AGL over rural areas). |
||||
|
AEC10 and AEC 11 are not included in this table, as any ARC reduction would result in ARC-a. A UAS operator claiming a reduction to ARC-a should demonstrate that all the requirements that define atypical or segregated airspace have been met. |
||||
Table C.2
To fully understand the above, the SORA provides three examples.
Example 1:
A UAS operator intends to operate in an airport/heliport environment, in class C airspace, which corresponds to AEC 1.
The UAS operator enters the initial ARC reduction table at Row AEC 1. Column A shows that the generalised airspace density of this environment is 5. Column B shows the associated initial ARC as ARC-d. Column C indicates that if a UAS operator can demonstrate that the actual, local airspace density corresponds to a generalised density rating of 3 or 4, then the ARC level may be reduced to a residual ARC-c (Column D). If a UAS operator demonstrates that the local airspace density corresponds more to scenarios with a density of 2 or 1, then the ARC level may be lowered to a residual ARC‑b (Column D).
Example 2:
A UAS operator intends to operate in an airport/heliport environment, in class G airspace, with a corresponding level of AEC 6.
The UAS operator enters the initial ARC reduction table at Row AEC 6. Column A shows that the generalised airspace density rating that corresponds with this environment is 3. Column B shows the associated initial ARC as ARC-c. Column C indicates that if a UAS operator can demonstrate that the actual, local, airspace density corresponds more to the reference scenario that has a generalised density rating of 1, namely AEC 10, then the residual ARC level may be reduced to ARC-b (Column D).
Example 3:
A UAS operator intends to operate below 150m (~500 ft) AGL, in a class G (uncontrolled) airspace, over an urbanised area, with a corresponding level of AEC 9.
The UAS operator enters the initial ARC reduction table at Row AEC 9. Column A indicates that the generalised airspace density rating corresponding with this environment is 2. Column B shows the associated initial ARC is ARC-c. Column C indicates that if a UAS operator demonstrates that the local airspace density corresponds more to a density rating of 1, namely AEC 10, then the residual ARC level may be reduced to ARC-b (Column D).
C.6.3 Lowering the initial ARC by common structures and rules (optional)
Today, aviation airspace rules and structures mitigate the risk of collision. As the airspace risk increases, more structures and rules are implemented to reduce the risk. In general, the higher the aircraft density, the higher the collision risk, and the more structures and rules are required to reduce the collision risk.
In general, manned aircraft do not use very low level (VLL) airspace, as it is below the minimum safe height to perform an emergency procedure, ‘unless at such a height as will permit, in the event of an emergency arising, a landing to be made without undue hazard to persons or property on the surface’ (Ref. point SERA.3105 of the SERA Regulation). Subject to permission from the competent authority, special flights may be granted permission to use this airspace. Every aircraft will cross VLL airspace in an airport environment for take-off and landing.
With the advent of UAS operations, VLL airspace is expected to soon become more crowded, requiring more common structures and rules to lower the collision risk. It is anticipated that U-space services will provide these risk mitigation measures. This will require mandatory participation by all aircraft in that airspace, similar to how the current flight rules apply to all manned aircraft operating in a particular airspace today.
SORA does not allow the initial ARC to be lowered through strategic mitigation by common structures and rules for all operations in AEC 1, 2, 3, 4, 5, and 1141 AEC 1, 2, 3, 4, and 5 already have manned airspace rules and structures defined by Regulation (EU) No 923/2012. Any UAS operating in these types of airspace shall comply with the applicable airspace rules, regulations and safety requirements. As such, no lowering of the ARC by common structures and rules is allowed, as those mitigations have already been accounted for in the assessment of those types of airspace. Lowering the ARC for rules and structures in AEC 1, 2, 3, 4, 5, and 11 would amount to double counting of the mitigations.. Outside the scope of SORA, a UAS operator may appeal to the competent authority to lower the ARC by strategic mitigation by using common structures. The determination of acceptability falls under the normal airspace rules, regulations and safety requirements for ATM/ANS providers.
Similarly, SORA does not allow for lowering the initial ARC through strategic mitigation by using common structures and rules for all operations in AEC 1042 AEC 10: the initial ARC is ARC-b. To lower the ARC in these volumes of airspace (to ARC-a) requires the operational volume to meet one of the requirements of atypical/segregated airspace..
The maximum amount of ARC reduction through strategic mitigation by using common structures and rules is by one ARC level.
SORA does allow for lowering the initial ARC through strategic mitigation by structures and rules for all operations below 150 m (~500 ft) AGL within VLL airspace (AECs 7, 8, 9 and 10).
To claim an ARC reduction, the UAS operator should show the following:
(a) the UA is equipped with an electronic cooperative system, and navigation and anti-collision lighting43 Although the SORA takes into account the questionable effects of anti-collision lighting, it also takes into account that the installation of anti-collision lights is often relatively simple and has a net positive effect in preventing collisions. ;
(b) a procedure has been implemented to verify the presence of other traffic during the UAS flight operation (e.g. checking other aircraft’s filed flight plans, NOTAMs44 Although NOTAMs are used here as an example, the use of NOTAMs may not be acceptable unless they cover all operations in VLL airspace. It is envisioned that a separate system like that of NOTAMs, which specifically addresses the concerns of VLL airspace, will fulfil this requirement., etc.);
(c) a procedure has been implemented to notify other airspace users of the planned UAS operation (e.g. filing of the UAS flight plan, applying for a NOTAM from the service provider for UAS45 Although flight plans and posting NOTAMS are used here as examples, the use of flight plans and NOTAMs may not be acceptable unless they cover all operations in VLL airspace. It is envisioned that a separate system, which specifically addresses the concerns of VLL airspace, will fulfil this requirement. operations, etc.);
(d) permission has been obtained from the airspace owner to operate in that airspace (if applicable);
(e) compliance with the airspace UAS flight rules, the UAS Regulation, and the policies, etc. applicable to the UAS operational volume and with which all/most aircraft are required to comply (these flight rules, the UAS Regulation, and policies are aimed primarily at UAS operations in VLL airspace);
(f) a UAS airspace structure (e.g. U-space) exists in VLL airspace to help keep UAS separated from manned aircraft. This structure must be complied with by all UAS in accordance with the EU46 The U-space regulation and the relevant adaptation of SERA will apply or national regulations;
(g) a UAS airspace procedural separation service has been implemented for VLL airspace. The use of this service must be mandatory for all UAS to keep UAS separated from manned aircraft47 This refers to possible future applications of an automated traffic management separation service for unmanned aircraft in a U-space environment. These applications may not exist as such today. A subscription to these services may be required. in accordance with the SERA Regulation; and
(h) all UAS operators can directly communicate with the air traffic controller or flight information services directly or through a U-space service provider in accordance with the SERA Regulation (EU).
C.6.3.1 Demonstration of strategic mitigation by structures and rules
The UAS operator is responsible for collecting and analysing the data required to demonstrate the effectiveness of their strategic mitigations by structures and rules to the competent authority.
C.7 Determination of the residual ARC risk level by the competent authority
As stated before, the UAS operator is responsible for collecting and analysing the data required to demonstrate the effectiveness of all their strategic mitigations to the competent authority.
The competent authority makes the final determination of the airspace residual ARC level.
Caution: As the SORA breaks down collision mitigation into strategic and tactical parts, there can be some overlap between all these mitigations. The UAS operator and the competent authority need to be cognisant and to ensure that mitigations are not counted twice.
For example, a UAS operator surveys a forest near an airport for beetle infestation, and the airspace was assessed as being ARC-b. The airport is hosting an air show. The competent authority informs the UAS operator that during the week of the air show, the ARC for that local airspace will be ARC-d. The UAS operator can either equip for ARC-d airspace or suspend operations until the air show is over.
TACTICAL MITIGATION COLLISION RISK ASSESSMENT
D.1 Introduction-tactical mitigation
The target audience for Annex D is the UAS operator who wishes to apply TMPR, robustness, integrity, and assurance levels for their operation.
Annex D provides the tactical mitigation(s) used to reduce the risk of a mid-air collision. The TMPR is driven by the residual collision risk of the airspace. Some of these tactical mitigations may also provide means of compliance with point SERA.3201 of the SERA Regulation, and the additional requirements of various states.
The air-risk model has been developed to provide a holistic method to assess the risk of an air encounter, and to mitigate the risk that an encounter develops into a mid-air collision. The SORA air-risk model guides the UAS operator, the competent authority, and/or ANSP in determining whether an operation can be conducted in a safe manner. This Annex is not intended to be used as a checklist, nor does it provide answers to all the challenges of DAA. The guidance allows a UAS operator to determine and apply a suitable means of mitigation to reduce the risk of a mid-air collision to an acceptable level. This guidance does not contain prescriptive requirements, but rather objectives to be met at various levels of robustness.
The mitigation of the risk that an encounter develops into a mid-air collision is a highly dynamic, variable, and complicated process. To simplify the process, the air-risk model takes a more qualitative approach to arrive at an initial aggregated airspace risk assessment. After an assessment of the initial, unmitigated risk of an encounter, and optional application of strategic mitigations, this Annex assigns a performance requirement on the UAS operation to mitigate the remaining collision hazard (i.e. the residual airspace risk).
D.3 Scope, assumptions and definitions
See Annex C for the scope and assumptions
D.4 Knowledge of terms and definitions
To understand this section, the following SORA definitions need to be understood:
(a) atypical/segregated vs other airspace;
(b) AEC (see Annex C);
(c) initial ARC (see Annex C);
(d) residual ARC (see Annex C);
(e) ICAO conflict management (see ICAO Doc 9854, Section 2.7);
(f) strategic mitigation (see Annex C);
(g) tactical mitigations and feedback loops; and
(h) VLOS and BVLOS.
A tactical mitigation is a mitigation applied after take-off, and for the air risk model, it takes the form of a ‘mitigating feedback loop’. This feedback loop is dynamic in that it reduces the rate of collision by modifying the geometry and dynamics of the aircraft in conflict, based on real-time aircraft conflict information.
D.5.1 Two classifications of tactical mitigation
There are two classifications of tactical mitigations within the SORA, namely:
(a) VLOS, whereby a pilot and/or observer uses (use) human vision to detect aircraft and take action to remain well clear from and avoid collisions with other aircraft.
(b) BVLOS, whereby an alternate means of mitigation to human vision, as in machine or machine assistance48 For the purposes of this dissection, systems like ATC separation services would be considered to be machine assisted., is applied to remain well clear from and avoid collisions with other aircraft (e.g. ATC separation services, TCAS, DAA, U-space, etc.).
Originally the regulations for ‘see and avoid’ and ‘avoid collisions’, defined in point SERA.3201 of the SERA Regulation, assumed that a pilot was on board the aircraft. With UA, this assumption is no longer valid, as the aircraft is piloted remotely.
Under VLOS, the pilot/UAS operator accomplishes ‘see and avoid’ by keeping the UAS within their VLOS. The UAS remains close enough to the remote pilot/observer to allow them to see and avoid another aircraft with human vision unaided by any device other than, perhaps, corrective lenses. VLOS is generally considered an acceptable means of compliance with the ‘remain well clear from’ and ‘avoiding collisions’ requirements of point SERA.3201 of the SERA Regulation.
VLOS generally provides sufficient mitigation for cases where the requirements for tactical mitigations are low, medium, and high. Different states may have other rules and restrictions for VLOS operations (e.g. altitudes, horizontal distances, times for relaying critical flight information, UAS operator/observer training, etc.). In some situations, the competent authority may decide that VLOS does not provide sufficient mitigation for the airspace risk, and may require compliance with additional rules and/or requirements. It is the UAS operators’ responsibility to comply with these rules and requirements.
The UAS operator should produce a documented VLOS de-confliction scheme, explaining the methods that will be applied for detection and the criteria used to avoid incoming traffic. If the remote pilot relies on detection by observers, the use of communication phraseology, procedures, and protocols should be described. Since the VLOS operation may be sufficiently complex, a requirement to document and approve the VLOS strategy is necessary before approval by the competent authority.
Since VLOS has operational limitations, there was a concerted effort to find an alternate means of compliance with the human ‘see and avoid’ requirements. This alternate means of mitigation is loosely described as ‘detect and avoid (DAA)’. DAA can be achieved in several ways, e.g. through ground-based DAA systems, air-based DAA systems, or some combination of the two. DAA may incorporate the use of various sensors, architectures, and even involve many different systems, a human in the loop, on the loop, or no human involvement at all.
TMPR provides tactical mitigations to assist the pilot in detecting and avoiding traffic under BVLOS conditions. The TMPR is the amount of tactical mitigation required to further mitigate the risks that could not be mitigated through strategic mitigation (the residual risk). The amount of residual risk is dependent on the ARC. Hence, the higher the ARC, the greater the residual risk, and the greater the TMPR.
Since the TMPR is the total performance required by all tactical mitigation means, tactical mitigations may be combined. When combining multiple tactical mitigations, it is important to recognise that the mitigation means may interact with each other, depending on the level of interdependency. This may negatively affect the effectiveness of the overall mitigation. Care should be exercised not to underestimate the negative effects of interactions between mitigation systems. Regardless of whether mitigations or systems are dependent or independent, when they act on the same event, unintended consequences may occur.
D.5.3.1 TMPR assignment risk ratio
The SORA TMPR is based on the findings of several studies. These studies provide performance guidance using risk ratios. Table shows the SORA TMPR risk ratio requirements derived from those studies.
|
Air-Risk Class |
TMPR |
TMPR system risk ratio objectives |
|
ARC-d |
high performance |
system risk ratio ≤ 0.1 |
|
ARC-c |
medium performance |
system risk ratio ≤ 0.33 |
|
ARC-b |
low performance |
system risk ratio ≤ 0.66 |
|
ARC-a |
No performance requirement |
No system risk ratio guidance; although the UAS operator/applicant may still need to show some form of mitigation as deemed necessary by the competent authority |
Table D.1 — TMPR risk ration requirements table
Table provides TMPR qualitative criteria as a qualitative means of compliance to help UAS operators translate the risk ratio quantitative values found in Table D.1 into system qualitative functional requirements. Table D.3 provides guidance for the TMPR integrity and assurance objectives for compliance with the objectives of Table C.1.
For the purpose of this assessment, the objectives of Table D.1 take precedence over the guidance provided in Tables D.2 and D.3.
D.5.3.2 TMPR qualitative criterion table
Table D.2, below, shows more qualitative criteria for the different functions and levels of the TMPR. The qualitative criteria are divided into five sub-functions of DAA, namely: detect, decide, command, execute, and the feedback loop. Where reference is made to the detection of a percentage of all aircraft, this should be read as a detection rate of the overall mix of aircraft anticipated to be encountered in the detection volume, and not limited to the detection of just the subset of aircraft in the mix.



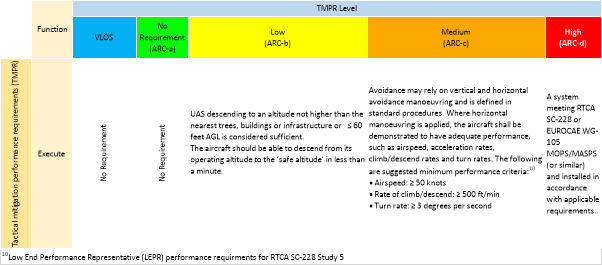
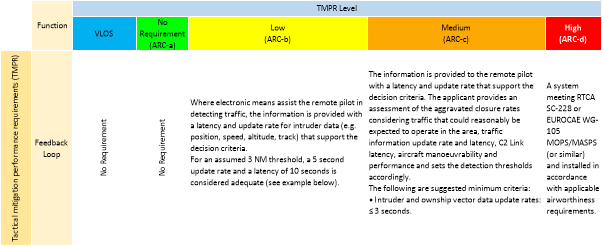 Table D.2 — TMPR qualitative criteria table
Table D.2 — TMPR qualitative criteria table
D.5.3.3 Effects of aircraft equipment on tactical system performance
The performance of a tactical mitigation is affected by the equipment of both the UAS and threat aircraft, on an encounter-by-encounter basis. A tactical mitigation mitigates the encounter risk by using a set of sub-functions of the DAA routine, namely see/detect, decide, command, execute, and feedback loop. Equipment that aids these sub-functions increases the overall performance of the tactical mitigation system.
The following example illustrates how the equipment of both the UAS and threat aircraft affects the overall tactical performance. Given a threat aircraft equipped with a transponder, it is easier for other aircraft to detect and track the threat aircraft. In this case, the UAS can be equipped with a system that is able to detect and track transponders. However, a UAS that mitigates the risk by locating the threat aircraft by detecting their transponder (e.g. through ACAS-II V. 7.1) cannot use the same approach to mitigate the risks posed by an aircraft without a transponder.
Tactical mitigation equipment is not homogeneous within the airspace. Different classes of airspace have different mixes of equipment. General aviation aircraft tend to be less well-equipped than commercial aircraft. There will be differences in the mix of general aviation/commercial aircraft from one location/airspace to another. Based on the aircraft equipment, a specific tactical system (e.g. FLARM, ACAS, etc.) could mitigate the risk of a collision in some classes of airspace and not in others.
Therefore, the UAS operator needs to understand the effectiveness of their tactical mitigation systems within the context of the airspace in which they intend to operate, and select systems used for tactical mitigation accordingly. A TCAS II 7.1/ACAS-II equipped UAS will not mitigate all the encounter risks in an area where sailplanes equipped with FLARM are known to operate.
D.5.4. TMPR robustness (integrity and assurance) assignment

Table D.3 — TMPR integrity and assurance objectives
D.6 Maintenance and continued airworthiness
The DAA maintenance and continued airworthiness requirements are addressed in the SAIL requirements; please refer to Annex E.
INTEGRITY AND ASSURANCE LEVELS FOR THE OPERATIONAL SAFETY OBJECTIVES (OSOs)
The following Table E.1 provides the basic principles to consider when using SORA Annex E.
|
|
Principle description |
Additional information |
|
#1 |
Annex E provides assessment criteria for the integrity (i.e. safety gain) and assurance (i.e. method of proof) of OSOs proposed by an applicant. |
The identification of OSOs for a given operation is the responsibility of the applicant. |
|
#2 |
Annex E does not cover the LoI of the competent authority. Lol is based on the competent authority’s assessment of the applicant’s ability to perform the given operation. |
|
|
#3 |
To achieve a given level of integrity/assurance, when more than one criterion exists for that level of integrity/assurance, all applicable criteria need to be met. |
|
|
#4 |
‘Optional’ cases defined in SORA main body Table 6 do not need to be defined in terms of integrity and assurance levels in Annex E. |
All robustness levels are acceptable for OSOs for which an ‘optional’ level of robustness is defined in Table 6 ‘Recommended OSOs’ of the SORA main body. |
|
#5 |
When the criteria to assess the level of integrity or assurance of an OSO rely on ‘standards’ that are not yet available, the OSO needs to be developed in a manner acceptable to the competent authority. |
|
|
#6 |
Annex E intentionally uses non-prescriptive terms (e.g. suitable, reasonably practicable) to provide flexibility to both the applicant and the competent authorities. This does not constrain the applicant in proposing mitigations, nor the competent authority in evaluating what is needed on a case-by-case basis. |
|
|
#7 |
This annex in its entirety also applies to single‑person organisations. |
|
Table E.1 – Basic principles to consider when using SORA Annex E
E.2 OSOs related to technical issues with the UAS
OSO #01 — Ensure that the UAS operator is competent and/or proven
|
TECHNICAL ISSUE WITH THE UAS |
Level of integrity |
|||
|
Low |
Medium |
High |
||
|
OSO #01 Ensure that the UAS operator is competent and/or proven |
Criteria |
The applicant is knowledgeable of the UAS being used and as a minimum has the following relevant operational procedures: checklists, maintenance, training, responsibilities, and associated duties. |
Same as low. In addition, the applicant has an organisation appropriate1 for the intended operation. Also, the applicant has a method to identify, assess, and mitigate the risks associated with flight operations. These should be consistent with the nature and extent of the operations specified. |
Same as medium. |
|
Comments |
N/A |
1 For the purpose of this assessment, ‘appropriate’ should be interpreted as commensurate with/proportionate to the size of the organisation and the complexity of the operation. |
N/A |
|
|
TECHNICAL ISSUE WITH THE UAS |
Level of assurance |
|||
|
Low |
Medium |
High |
||
|
OSO #01 Ensure that the UAS operator is competent and/or proven |
Criteria |
The elements delineated in the level of integrity are addressed in the ConOps. |
Prior to the first operation, the competent authority of the MS or an entity that is designated by the competent authority performs an audit of the organisation. |
The applicant holds an organisational operating certificate (e.g LUC) or has a recognised flight test organisation. In addition, the competent authority of the MS or an entity that is designated by the competent authority verifies the UAS operator’s competencies. |
|
Comments |
N/A |
N/A |
N/A |
|
OSO #02 — UAS designed and produced by a competent and/or proven entity
|
TECHNICAL ISSUE WITH THE UAS |
Level of integrity |
|||
|
Low |
Medium |
High |
||
|
OSO #02 UAS designed and produced by a competent and/or proven entity |
Criteria for design |
As a minimum, design documentation covers: (a) the specification of the materials; and (b) the suitability and durability of the materials used. |
Same as low. In addition, design documentation also covers: (a) the configuration control; and (b) identification and traceability. |
The design organisation complies with Subpart J of Annex I (Part 21) to Regulation (EU) No 748/2012. |
|
Criteria for production |
As a minimum,production procedures cover the processes necessary to allow for repeatability in manufacturing, and conformity within acceptable tolerances. |
Same as low. In addition, production procedures also cover: (a) the configuration control; (b) the verification of incoming products, parts, materials, and equipment; (c) identification and traceability; (d) in-process and final inspections & testing; (e) the control and calibration of tools; (f) handling and storage; and (g) the control of non-conforming items. |
The production organisation complies with the organisational requirements that are defined in Subpart F or G of Annex I (Part 21) to Regulation (EU) No 748/2012. |
|
|
Comments |
N/A |
N/A |
N/A |
|
|
TECHNICAL ISSUE WITH THE UAS |
Level of assurance |
|||
|
Low |
Medium |
High |
||
|
OSO #02 UAS designed and produced by a competent and/or proven entity |
Criteria for design |
The specifications, suitability and durability of the materials are declared against a standard recognised by the competent authority and/or in accordance with means of compliance acceptable to the competent authority. |
Same as low. In addition, evidence is available that the UAS has been designed in accordance with design procedures. The competent authority should request the applicant to use a UAS for which EASA has verified the claimed integrity through a DVR. |
Same as medium. In addition, the competent authority should request the applicant to operate a UAS designed by an organisation approved by EASA according to Subpart J of Annex I (Part 21) to Regulation (EU) No 748/2012. |
|
Criteria for production |
The declared production procedures are developed to a standard that is considered adequate by the competent authority that issues the operational authorisation and/or in accordance with a means of compliance acceptable to that authority. |
Same as low. In addition, evidence is available that the UAS has been produced in conformance with its design. |
Same as medium. In addition:, the competent authority of the MS or an entity that is designated by the competent authority validates compliance with the production organisational requirements that are defined in Subpart F or G of Annex I (Part 21) to Regulation (EU) No 748/2012. |
|
|
Comments |
N/A |
N/A |
N/A |
|
OSO #03 — UAS maintained by competent and/or proven entity
|
TECHNICAL ISSUE WITH THE UAS |
Level of integrity |
|||
|
Low |
Medium |
High |
||
|
OSO #03 UAS maintained by a competent and/or proven entity (e.g. industry standards) |
Criteria
|
(a) The UAS maintenance instructions are defined, and, when applicable, cover the UAS designer’s instructions and requirements. (b) The maintenance staff is competent and has received an authorisation to carry out UAS maintenance. (c) The maintenance staff use the UAS maintenance instructions while performing maintenance. |
Same as low. In addition: (a) Scheduled maintenance of each UAS is organised and in accordance with a maintenance programme. (b) Upon completion, the maintenance log system is used to record all the maintenance conducted on the UAS, including releases. A maintenance release can only be accomplished by a staff member who has received a maintenance release authorisation for that particular UAS model/family. |
Same as medium. In addition, the maintenance staff work in accordance with a maintenance procedure manual that provides information and procedures relevant to the maintenance facility, records, maintenance instructions, release, tools, material, components, defect deferral, etc. |
|
Comments |
N/A |
N/A |
N/A |
|
|
TECHNICAL ISSUE WITH THE UAS |
Level of assurance |
|||
|
Low |
Medium |
High |
||
|
OSO #03 UAS maintained by a competent and/or proven entity (e.g. industry standards) |
Criterion #1 (Procedure) |
(a) The maintenance instructions are documented. (b) The maintenance conducted on the UAS is recorded in a maintenance log system1/2. (c) A list of the maintenance staff authorised to carry out maintenance is established and kept up to date. |
Same as low. In addition: (a) The maintenance programme is developed in accordance with standards considered adequate by the competent authority of the MS and/or in accordance with a means of compliance acceptable to that authority. In addition, if the UAS has a DVR or a (R)TC, the maintenance programme includes the scheduled maintenance requirements developed as part of the design. (b) A list of the maintenance staff with maintenance release authorisation is established and kept up to date. |
Same as medium. In addition, the maintenance programme and the maintenance procedures manual are validated by the competent authority of the MS or by an entity that is designated by the competent authority. |
|
Comments |
1 The objective is to record all the maintenance performed on the aircraft, and why it is performed (rectification of defects or malfunctions, modifications, scheduled maintenance, etc.). 2 The maintenance log may be requested for inspection/audit by the approving authority or an authorised representative. |
N/A |
N/A |
|
|
Criterion #2 (Training) |
A record of all the relevant qualifications, experience and/or training completed by the maintenance staff is established and kept up to date. |
Same as low. In addition: (a) The initial training syllabus and training standard, including theoretical/practical elements, duration, etc., is defined and is commensurate with the authorisation held by the maintenance staff. (b) For staff that hold a maintenance release authorisation, the initial training is specific to that particular UAS model/family. (c) All maintenance staff have undergone initial training. |
Same as medium. In addition: (a) A programme for the recurrent training of staff holding a maintenance release authorisation is established; and (b) This programme is validated by the competent authority of the MS or by an entity that is designated by the competent authority. |
|
|
Comments |
N/A |
N/A |
N/A |
|
OSO #04 — UAS developed to authority recognised design standards
|
TECHNICAL ISSUE WITH THE UAS |
Level of integrity |
|||
|
Low |
Medium |
High |
||
|
OSO #04 UAS developed to authority recognised design standards |
Criteria |
The UAS is designed to standards considered adequate by the competent authority and/or in accordance with a means of compliance acceptable to that authority. The standards and/or the means of compliance should be applicable to a low level of integrity and the intended operation. |
The UAS is designed to standards considered adequate by the competent authority and/or in accordance with a means of compliance acceptable to that authority. The standards and/or the means of compliance should be applicable to a medium level of integrity and the intended operation. |
The UAS is designed to standards considered adequate by the competent authority and/or in accordance with a means of compliance acceptable to that authority. The standards and/or the means of compliance should be applicable to a high level of integrity and the intended operation. |
|
Comments |
In case of experimental flights that investigate new technical solutions, the competent authority may accept that recognised standards are not met. |
|||
|
TECHNICAL ISSUE WITH THE UAS |
Level of assurance |
|||
|
Low |
Medium |
High |
||
|
OSO #04 UAS developed to authority recognised design standards |
Criteria |
The competent authority should request the applicant to use a UAS for which EASA has verified the claimed integrity through a DVR. |
The competent authority should request the applicant to use a UAS for which EASA has issued a type certificate or restricted type certificate in accordance with Annex I (Part 21) to Regulation (EU) No 748/2012 |
The competent authority should request the applicant to use a UAS for which EASA has issued a type certificate or restricted type certificate in accordance with Annex I (Part 21) to Regulation (EU) No 748/2012 |
|
Comments |
N/A |
N/A |
N/A |
|
OSO #05 — UAS is designed considering system safety and reliability
This OSO complements:
(a) the safety requirements for containment defined in the main body; and
(b) OSO #10 and OSO #12, which only address the risk of a fatality while operating over populated areas or assemblies of people.
|
TECHNICAL ISSUE WITH THE UAS |
Level of integrity |
|||
|
Low |
Medium |
High |
||
|
OSO #05 UAS is designed considering system safety and reliability |
Criteria |
The equipment, systems, and installations are designed to minimise hazards1 in the event of a probable2 malfunction or failure of the UAS. |
Same as low. In addition, the strategy for detection, alerting and management of any malfunction, failure or combination thereof, which would lead to a hazard, is available. |
Same as medium. In addition: (a) Major failure conditions are not more frequent than remote3; (b) Hazardous failure conditions are not more frequent than extremely remote3; (c) Catastrophic failure conditions are not more frequent than extremely improbable3; and (d) SW and AEH whose development error(s) may cause or contribute to hazardous or catastrophic failure conditions are developed to an industry standard or a methodology considered adequate by EASA and/or in accordance with means of compliance acceptable to EASA4. |
|
Comments |
1 For the purpose of this assessment, the term ‘hazard’ should be interpreted as a failure condition that relates to major, hazardous, or catastrophic consequences. 2 For the purpose of this assessment, the term ‘probable’ should be interpreted in a qualitative way as ‘anticipated to occur one or more times during the entire system/operational life of a UAS’. |
N/A |
3 Safety objectives may be derived from JARUS AMC RPAS.1309 Issue 2 Table 3 depending on the kinetic energy assessment made in accordance with Section 6 of EASA policy E.Y013-01. 4 Development assurance levels (DALs) for SW/AEH may be derived from JARUS AMC RPAS.1309 Issue 2 Table 3 depending on the kinetic energy assessment made in accordance with Section 6 of EASA policy E.Y013-01. |
|
|
TECHNICAL ISSUE WITH THE UAS |
Level of assurance |
|||
|
Low |
Medium |
High |
||
|
OSO #05 UAS is designed considering system safety and reliability |
Criteria |
A functional hazard assessment1 and a design and installation appraisal that show that hazards are minimised, are available.
|
Same as low. In addition: (a) Safety analyses are conducted in line with standards considered adequate by the competent authority and/or in accordance with a means of compliance acceptable to that authority. (b) A strategy for the detection of single failures of concern includes pre-flight checks. The competent authority should request the applicant to use a UAS for which EASA has validated the claimed integrity through a DVR. |
The competent authority should request the applicant to use a UAS for which EASA has issued a type certificate or restricted type certificate in accordance with Annex I (Part 21) to Regulation (EU) No 748/2012. |
|
Comments |
1 The severity of failure conditions (no safety effect, minor, major, hazardous and catastrophic) should be determined according to the definitions provided in JARUS AMC RPAS.1309 Issue 2. |
N/A |
N/A |
|
OSO #06 — C3 link characteristics (e.g. performance, spectrum use) are appropriate for the operation
(a) For the purpose of the SORA and this specific OSO, the term ‘C3 link’ encompasses:
(1) the C2 link; and
(2) any communication link required for the safety of the flight.
(b) To correctly assess the integrity of this OSO, the applicant should identify the following:
(1) The performance requirements for the C3 links necessary for the intended operation.
(2) All the C3 links, together with their actual performance and RF spectrum usage.
Note: The specification of the performance and RF spectrum for a C2 Link is typically documented by the UAS designer in the UAS manual.
Note: The main parameters associated with the performance of a C2 link (RLP) and the performance parameters for other communication links (e.g. RCP for communication with ATC) include, but are not limited to, the following:
(i) the transaction expiration time;
(ii) the availability;
(iii) the continuity; and
(iv) the integrity.
Refer to the ICAO references for definitions.
(3) The RF spectrum usage requirements for the intended operation (including the need for authorisation if required).
Note: Usually, countries publish the allocation of RF spectrum bands applicable in their territories. This allocation stems mostly from the International Communication Union (ITU) Radio Regulations. However, the applicant should check the local requirements and request authorisation when needed since there may be national differences and specific allocations (e.g. national sub-divisions of ITU allocations). Some aeronautical bands (e.g. AM(R)S, AMS(R)S 5030-5091MHz) were allocated for potential use in UAS operations under the ICAO scope for UAS operations classified as cat. C (‘certified’), but their use may be authorised for operations under the ‘specific’ category. It is expected that the use of other licensed bands (e.g. those allocated to mobile networks) may also be authorised under the ‘specific’ category. Some un-licensed bands (e.g. industrial, scientific and medical (ISM) or short-range devices (SRDs)) may also be acceptable under the ‘specific’ category; for instance, for operations with lower integrity requirements.
(4) Environmental conditions that might affect the performance of C3 links.
|
TECHNICAL ISSUE WITH THE UAS |
Level of integrity |
|||
|
Low |
Medium |
High |
||
|
OSO #06 C3 link characteristics (e.g. performance, spectrum use) are appropriate for the operation |
Criteria |
(a) The applicant determines that the performance, RF spectrum usage1 and environmental conditions for C3 links are adequate to safely conduct the intended operation. (b) The remote pilot has the means to continuously monitor the C3 performance and ensures that the performance continues to meet the operational requirements2. |
Same as low3. |
Same as low. In addition, the use of licensed4 frequency bands for C2 Links is required. |
|
Comments |
1 For a low level of integrity, unlicensed frequency bands might be acceptable under certain conditions, e.g.: (a) the applicant demonstrates compliance with other RF spectrum usage requirements (e.g. Directive 2014/53/EU), by showing that the UAS equipment is compliant with these requirements; and (b) the use of mechanisms to protect against interference (e.g. FHSS, frequency de-confliction by procedure). 2 The remote pilot has continual and timely access to the relevant C3 information that could affect the safety of flight. For operations requesting only a low level of integrity for this OSO, this could be achieved by monitoring the C2 link signal strength and receiving an alert from the UAS HMI if the signal strength becomes too low. |
3 Depending on the operation, the use of licensed frequency bands might be necessary. In some cases, the use of non‑aeronautical bands (e.g. licensed bands for cellular network) may be acceptable. |
4 This ensures a minimum level of performance and is not limited to aeronautical licensed frequency bands (e.g. licensed bands for cellular network). Nevertheless, some operations may require the use of bands allocated to the aeronautical mobile service for the use of C2 Link (e.g. 5030 – 5091 MHz). In any case, the use of licensed frequency bands needs authorisation. |
|
|
TECHNICAL ISSUE WITH THE UAS |
Level of assurance |
|||
|
Low |
Medium |
High |
||
|
OSO #06 C3 link characteristics (e.g. performance, spectrum use) are appropriate for the operation |
Criteria |
The applicant declares that the required level of integrity has been achieved. |
The competent authority should request the applicant to use a UAS for which EASA has verified the claimed integrity through a DVR. |
The competent authority should request the applicant to use a UAS for which EASA has issued a type certificate or restricted type certificate in accordance with Annex I (Part 21) to Regulation (EU) No 748/2012. |
|
Comments |
N/A |
N/A |
N/A |
|
OSO #07 — Inspection of the UAS (product inspection) to ensure consistency with the ConOps
The intent of this OSO is to ensure that the UAS used for the operation conforms to the UAS data used to support the approval/authorisation of the operation.
|
TECHNICAL ISSUE WITH THE UAS |
Level of integrity |
|||
|
Low |
Medium |
High |
||
|
OSO #07 Inspection of the UAS (product inspection) to ensure consistency with the ConOps |
Criteria |
The remote crew ensures that the UAS is in a condition for safe operation and conforms to the approved ConOps.1 |
||
|
Comments |
1 The distinction between a low, a medium and a high level of robustness for this criterion is achieved through the level of assurance (see the table below). |
|||
|
TECHNICAL ISSUE WITH THE UAS |
Level of assurance |
|||
|
Low |
Medium |
High |
||
|
OSO #07 Inspection of the UAS (product inspection) to ensure consistency with the ConOps |
Criterion #1 (Procedures) |
Product inspection is documented and accounts for the manufacturer’s recommendations, if available. |
Same as low. In addition, the product inspection is documented using checklists. |
Same as medium. In addition, the product inspection procedures are validated by the competent authority of the MS or by an entity that is designated by the competent authority. |
|
Comments |
N/A |
N/A |
N/A |
|
|
Criterion #2 (Training) |
The remote crew is trained to perform the product inspection, and that training is self-declared (with evidence available). |
(a) A training syllabus including a product inspection procedure is available. (b) The UAS operator provides competency-based, theoretical and practical training. |
The competent authority of the MS or an entity that is designated by the competent authority: (a) validates the training syllabus; and (b) verifies the remote crew competencies. |
|
|
Comments |
N/A |
N/A |
N/A |
|
E.3 OSOs related to operational procedures
|
OPERATIONAL PROCEDURES |
Level of integrity |
|||
|
Low |
Medium |
High |
||
|
OSO #08, OSO #11, OSO #14 and OSO #21 |
Criterion #1 (Procedure definition) |
(a) Operational procedures1 appropriate for the proposed operation are defined and, as a minimum, cover the following elements: (1) Flight planning; (2) Pre- and post-flight inspections; (3) Procedures to evaluate the environmental conditions before and during the mission (i.e. real-time evaluation); (4) Procedures to cope with unexpected adverse operating conditions (e.g. when ice is encountered during an operation not approved for icing conditions); (5) Normal procedures; (6) Contingency procedures (to cope with abnormal situations); (7) Emergency procedures (to cope with emergency situations); (8) Occurrence-reporting procedures; and (b) The limitations of the external systems supporting the UAS operation2 are defined in an OM. |
||
|
Comments |
1 Operational procedures cover the deterioration of the UAS itself and any external system supporting the UAS operation. To properly address the deterioration of external systems required for the operation, it is recommended to: (a) identify these ‘external systems’; (b) identify the modes of deterioration of the ‘external systems’ (e.g. complete loss of GNSS, GDOP/PDOP, latency issues, etc.) which would lead to a loss of control of the operation; (c) describe the means to detect these modes of deterioration of the external systems ; and (d) describe the procedure(s) used when deterioration is detected (e.g. activation of the emergency recovery capability, switch to manual control, etc.). 2 In the scope of this assessment, external systems supporting the UAS operation are defined as systems that are not already part of the UAS but are used to: (a) launch/take off the UA; (b) make pre-flight checks; or (c) keep the UA within its operational volume (e.g. GNSS, satellite systems, air traffic management, U-space). External systems activated/used after a loss of control of the operation are excluded from this definition. |
|||
|
Criterion #2 (Procedure complexity) |
Operational procedures are complex and may potentially jeopardise the crew’s ability to respond by increasing the remote crew’s workload and/or their interaction with other entities (e.g. ATM, etc.). |
Contingency/emergency procedures require manual control by the remote pilot2 when the UAS is usually automatically controlled. |
Operational procedures are simple. |
|
|
Comments |
N/A |
2 It should be considered that not all UAS have a mode where the pilot could directly control the surfaces; moreover, it may require significant skill not to make things worse. |
N/A |
|
|
Criterion #3 (Consideration of Potential Human Error) |
At a minimum, operational procedures provide: (a) a clear distribution and assignment of tasks, and (b) an internal checklist to ensure staff are adequately performing their assigned tasks. |
Operational procedures take human error into consideration. |
Same as medium. In addition, the remote crew3 receives crew resource management (CRM)4 training. |
|
|
Comments |
N/A |
N/A |
3 In the context of SORA, the term ‘remote crew’ refers to any person involved in the mission. 4 CRM training focuses on the effective use of all the remote crew to ensure safe and efficient operation, reducing error, avoiding stress and increasing efficiency. |
|
|
OPERATIONAL PROCEDURES |
Level of assurance |
|||
|
Low |
Medium |
High |
||
|
OSO #08, OSO #11, OSO #14 and OSO #21 |
Criteria |
(a) Operational procedures do not require validation against either a standard or a means of compliance that is considered adequate by the competent authority of the MS. (b) The adequacy of the operational procedures is declared, except for emergency procedures, which are tested. |
(a) Normal, contingency, and emergency procedures are documented and part of the operations manual (OM). (b) Operational procedures are validated against standards considered adequate by the competent authority of the MS and/or in accordance with the means of compliance acceptable to that authority1. (c) The adequacy of the contingency and emergency procedures is proven through: (1) dedicated flight tests; or (2) simulation, provided that the representativeness of the simulation means is proven valid for the intended purpose with positive results; or (3) any ot+her means acceptable to the competent authority. |
Same as medium. In addition: (a) Flight tests performed to validate the procedures and checklists cover the complete flight envelope or are proven to be conservative. (b) The procedures, checklists, flight tests and simulations are validated by the competent authority of the MS or by an entity that is designated by the competent authority. |
|
Comments |
N/A |
1 AMC2 UAS.SPEC.030(3)(e) (Operational procedures for medium and high levels of robustness) is considered an acceptable means of compliance. |
||
E.4 OSOs related to remote crew training
(a) The applicant needs to propose competency-based, theoretical and practical training that:
(1) is appropriate for the operation to be approved; and
(2) includes proficiency requirements and recurrent training.
(b) The entire remote crew (i.e. any person involved in the operation) should undergo competency-based, theoretical and practical training specific to their duties (e.g. pre-flight inspection, ground equipment handling, evaluation of the meteorological conditions, etc.).
|
REMOTE CREW COMPETENCIES |
Level of integrity |
|||
|
Low |
Medium |
High |
||
|
OSO #09, OSO #15 and OSO #22 |
Criteria |
The competency-based, theoretical and practical training is adequate for the operation1 and ensures knowledge of: (a) the UAS Regulation; (b) airspace operating principles; (c) airmanship and aviation safety; (d) human performance limitations; (e) meteorology; (f) navigation/charts; (g) the UAS; and (h) operating procedures. |
||
|
Comments |
1 The distinction between a low, a medium and a high level of robustness for this criterion is achieved through the level of assurance (see table below). |
|||
|
REMOTE CREW COMPETENCIES |
Level of assurance |
|||
|
Low |
Medium |
High |
||
|
OSO #09, OSO #15 and OSO #22 |
Criteria |
Training is self-declared (with evidence available). |
(a) Training syllabus is available and kept up to date. (b) The UAS operator provides competency-based, theoretical and practical training. |
The competent authority of the MS or an entity that is designated by the competent authority: (a) validates the training syllabus; and (b) verifies the remote crew competencies. |
|
Comments |
N/A |
N/A |
N/A |
|
E.5 OSOs related to safe design
(a) The objectives of OSO#10 and OSO#12 are to complement the technical containment safety requirements by addressing the risk of a fatality while operating over populated areas or assemblies of people.
(b) In the scope of this assessment, external systems supporting UAS operations are defined as systems that are not already part of the UAS but are used to:
(1) launch/take off the UA;
(2) make pre-flight checks; or
(3) keep the UA within its operational volume (e.g. GNSS, satellite systems, air traffic management, U-space).
External systems activated/used after a loss of control of the operation are excluded from this definition.
|
|
LEVEL of INTEGRITY |
|||
|
Low |
Medium |
High |
||
|
OSO #10 & OSO #12 |
Criteria |
When operating over populated areas or assemblies of people, it can be reasonably expected that a fatality will not occur from any probable1 failure2 of the UAS or any external system supporting the operation. |
When operating over populated areas or assemblies of people, it can be reasonably expected that a fatality will not occur from any single failure3 of the UAS or any external system supporting the operation. SW and AEH whose development error(s) could directly lead to a failure affecting the operation in such a way that it can be reasonably expected that a fatality will occur, are developed to a standard considered adequate by the competent authority and/or in accordance with means of compliance acceptable to that authority. |
Same as medium |
|
Comments |
1 For the purpose of this assessment, the term ‘probable’ should be interpreted in a qualitative way as, ‘anticipated to occur one or more times during the entire system/operational life of a UAS’. 2 Some structural or mechanical failures may be excluded from the criterion if it can be shown that these mechanical parts were designed according to aviation industry best practices. |
3 Some structural or mechanical failures may be excluded from the no-single failure criterion if it can be shown that these mechanical parts were designed to a standard considered adequate by the competent authority and/or in accordance with a means of compliance acceptable to that authority |
|
|
|
LEVEL of ASSURANCE |
||||
|
Low |
Medium |
High |
||
|
OSO #10 & OSO #12 |
Criteria |
A design and installation appraisal is available. In particular, this appraisal shows that: (a) the design and installation features (independence, separation and redundancy) satisfy the low integrity criterion; and (b) particular risks relevant to the ConOps (e.g. hail, ice, snow, electromagnetic interference, etc.) do not violate the independence claims, if any. |
Same as low. In addition, the level of integrity claimed is substantiated by analysis and/or test data with supporting evidence. If the operation is classified as SAIL IV, the competent authority should request the applicant to use a UAS for which EASA has verified the claimed integrity through a DVR. |
The competent authority should request the applicant to use a UAS for which EASA has issued a type certificate or restricted type certificate in accordance with Annex I (Part 21) to Regulation (EU) No 748/2012. |
|
Comments |
N/A |
N/A |
N/A |
|
E.6 OSOs related to the deterioration of external systems supporting UAS operations
For the purpose of SORA and this specific OSO, the term ‘external services supporting UAS operations’ encompasses any service providers necessary for the safety of the flight, such as communication service providers (CSPs) and U-space service providers49External service should be understood as any service that is provided to the UAS operator, which is necessary to ensure the safety of a UAS operation and is provided by a service provider other than the UAS operator. Examples of external services are:
- provision of geographical zones data and geographical limitations (including orography);
- collection and transfer of occurrence data;
- training and assessment of remote pilots;
- communication services that support the C2 link and any other safety-related communication;
- services that support navigation, e.g. GNSS services (compliance with requirement UAS.STS-01.030(6) could be ensured by referring to the conditions of use of such services in the corresponding Service Definition Document (SDD) or an equivalent one if available.);
- provision of services related to flight planning and management, including related safety assessments; and
- U-space services, which are defined in the corresponding regulation(s) and may include one or more of the above-mentioned services..
|
DETERIORATION OF EXTERNAL SYSTEMS SUPPORTING UAS OPERATIONS BEYOND THE CONTROL OF THE UAS |
Level of integrity |
|||
|
Low |
Medium |
High |
||
|
OSO #13 External services supporting UAS operations are adequate for the operation |
Criteria |
The applicant ensures that the level of performance for any externally provided service necessary for the safety of the flight is adequate for the intended operation. If the externally provided service requires communication between the UAS operator and the service provider, the applicant ensures there is effective communication to support the service provision. Roles and responsibilities between the applicant and the external service provider are defined. |
||
|
Comments |
N/A |
N/A |
Requirements for contracting services with the service provider may be derived from ICAO Standards and Recommended Practices (SARPs) that are currently under development. |
|
|
DETERIORATION OF EXTERNAL SYSTEMS SUPPORTING UAS OPERATIONS BEYOND THE CONTROL OF THE UAS |
Level of assurance |
|||
|
Low |
Medium |
High |
||
|
OSO #13 External services supporting UAS operations are adequate for the operation |
Criteria |
The applicant declares that the requested level of performance for any externally provided service necessary for the safety of the flight is achieved (without evidence being necessarily available). |
The applicant has supporting evidence that the required level of performance for any externally provided service required for the safety of the flight can be achieved for the full duration of the mission. This may take the form of a service-level agreement (SLA) or any official commitment that prevails between a service provider and the applicant on the relevant aspects of the service (including quality, availability, and responsibilities). The applicant has a means to monitor externally provided services which affect flight-critical systems and take appropriate actions if real-time performance could lead to the loss of control of the operation. |
Same as medium. In addition: (a) the evidence of the performance of an externally provided service is achieved through demonstrations; and (b) the competent authority of the MS or an entity that is designated by the competent authority validates the claimed level of integrity. |
|
Comments |
N/A |
N/A |
N/A |
|
E.7 OSOs related to human error
OSO #16 — Multi-crew coordination
This OSO applies only to those personnel directly involved in the flight operation.
|
HUMAN ERROR |
Level of integrity |
|||
|
Low |
Medium |
High |
||
|
OSO #16 Multi crew coordination |
Criterion #1 (Procedures) |
Procedure(s) to ensure coordination between the crew members and robust and effective communication channels is (are) available and at a minimum cover: (a) assignment of tasks to the crew, and (b) establishment of step-by-step communications.1 |
||
|
Comments |
1 The distinction between a low, a medium and a high level of robustness for this criterion is achieved through the level of assurance (see the table below). |
|||
|
Criterion #2 (Training) |
Remote crew training covers multi-crew coordination |
Same as low. In addition, the remote crew2 receives CRM3 training. |
Same as medium. |
|
|
Comments |
N/A |
2 In the context of the SORA, the term ‘remote crew’ refers to any person involved in the mission. 3 CRM training focuses on the effective use of all the remote crew to assure a safe and efficient operation, reducing error, avoiding stress and increasing efficiency. |
N/A |
|
|
Criterion #3 (Communication devices) |
N/A |
Communication devices comply with standards considered adequate by the competent authority and/or in accordance with a means of compliance acceptable to that authority. |
Communication devices are redundant4 and comply with standards considered adequate by the competent authority and/or in accordance with a means of compliance acceptable to that authority. |
|
|
Comments |
N/A |
N/A |
4 This implies the provision of an extra device to cope with the failure of the first device. |
|
|
HUMAN ERROR |
LEVEL of ASSURANCE |
|||
|
Low |
Medium |
High |
||
|
OSO #16 Multi crew coordination |
Criterion #1 (Procedures) |
(a) Procedures are not validated against either a standard or a means of compliance considered adequate by the competent authority of the MS. (b) The adequacy of the procedures and checklists is declared. |
(a) Procedures are validated against standards considered adequate by the competent authority of the MS and/or in accordance with the means of compliance acceptable to that authority1. (b) The adequacy of the procedures is proven through: (1) dedicated flight tests; or (2) simulation, provided that the representativeness of the simulation means is proven valid for the intended purpose with positive results; or (3) any other means acceptable to the competent authority. |
Same as medium. In addition: (a) flight tests performed to validate the procedures cover the complete flight envelope or are proven to be conservative; and (b) the procedures, flight tests and simulations are validated by the competent authority of the MS or an entity designated by the competent authority. |
|
Comments |
N/A |
1 AMC2 UAS.SPEC.030(3)(e) (Operational procedures for medium and high levels of robustness) is considered an acceptable means of compliance. |
N/A |
|
|
Criterion #2 (Training) |
Training is self-declared (with evidence available). |
(a) Training syllabus is available. (b) The UAS operator provides competency-based, theoretical and practical training. |
The competent authority of the MS or an entity that is designated by the competent authority: (a) validates the training syllabus; and (b) verifies the remote crew competencies. |
|
|
Comments |
N/A |
N/A |
N/A |
|
|
Criterion #3 (Communication devices) |
N/A |
The applicant has supporting evidence that the required level of integrity is achieved. This is typically done by testing, analysis, simulation1, inspection, design review or through operational experience. |
The competent authority should request the applicant to operate a UAS designed by an organisation approved by EASA according to Subpart J of Annex I (Part 21) to Regulation (EU) No 748/2012. |
|
|
Comments |
N/A |
1 When simulation is performed, the validity of the targeted environment that is used in the simulation needs to be justified. |
N/A |
|
OSO #17 — Remote crew is fit to operate
(a) For the purpose of this assessment, the expression ‘fit to operate’ should be interpreted as physically and mentally fit to perform their duties and safely discharge their responsibilities.
(b) Fatigue and stress are contributory factors to human error. Therefore, to ensure that vigilance is maintained at a satisfactory level of safety, consideration may be given to the following:
(1) remote crew duty times;
(2) regular breaks;
(3) rest periods; and
(4) handover/takeover procedures.
|
HUMAN ERROR |
Level of integrity |
|||
|
Low |
Medium |
High |
||
|
OSO #17 Remote crew is fit to operate |
Criteria |
The applicant has a policy defining how the remote crew can declare themselves fit to operate before conducting any operation. |
Same as low. In addition: — Duty, flight duty and resting times for the remote crew are defined by the applicant and adequate for the operation. — The UAS operator defines requirements appropriate for the remote crew to operate the UAS. |
Same as Medium. In addition: — The remote crew is medically fit, — A fatigue risk management system (FRMS) is in place to manage any escalation in duty/flight duty times. |
|
Comments |
N/A |
N/A |
N/A |
|
|
HUMAN ERROR |
LEVEL of ASSURANCE |
|||
|
Low |
Medium |
High |
||
|
OSO #17 Remote crew is fit to operate |
Criteria |
The policy to define how the remote crew declares themselves fit to operate (before an operation) is documented. The remote crew fit-to-operate declaration (before an operation) is based on a policy defined by the applicant. |
Same as low. In addition: — Remote crew duty, flight duty and the resting time policy are documented. — Remote crew duty cycles are logged and cover at a minimum: — when the remote crew member’s duty day commences, — when the remote crew members are free from duties, and — resting times within the duty cycle. — There is evidence that the remote crew is fit to operate the UAS. |
Same as medium. In addition: — Medical standards considered adequate by the competent authority and/or the means of compliance acceptable to that authority are established and the competent authority of the MS or an entity that is designated by the competent authority verifies that the remote crew is medically fit. — The competent authority of the MS or an entity that is designated by the competent authority validates the duty/flight duty times. — If an FRMS is used, it is validated and monitored by the competent authority of the MS or an entity that is designated by the competent authority. |
|
Comments |
N/A |
N/A |
N/A |
|
OSO #18 — Automatic protection of the flight envelope from human errors
(a) Each UA is designed with a flight envelope that describes its safe performance limits with regard to minimum and maximum operating speeds, and its operating structural strength.
(b) Automatic protection of the flight envelope is intended to prevent the remote pilot from operating the UA outside its flight envelope. If the applicant demonstrates that the remote-pilot is not in the loop, this OSO is not applicable.
(c) A UAS implementing such an automatic protection function will ensure that the UA is operated within an acceptable flight envelope margin even in the case of incorrect remote-pilot control inputs (human errors).
(d) UAS without automatic protection functions are susceptible to incorrect remote-pilot control inputs (human errors), which can result in the loss of the UA if the designed performance limits of the aircraft are exceeded.
(e) Failures or development errors of the flight envelope protection are addressed in OSOs #5, #10 and #12.
|
HUMAN ERROR |
LEVEL of INTEGRITY |
|||
|
Low |
Medium |
High |
||
|
OSO #18 Automatic protection of the flight envelope from human errors |
Criteria |
The UAS flight control system incorporates automatic protection of the flight envelope to prevent the remote pilot from making any single input under normal operating conditions that would cause the UA to exceed its flight envelope or prevent it from recovering in a timely fashion. |
The UAS flight control system incorporates automatic protection of the flight envelope to ensure the UA remains within the flight envelope or ensures a timely recovery to the designed operational flight envelope following remote pilot error(s).1 |
|
|
Comments |
N/A |
1 The distinction between a medium and a high level of robustness for this criterion is achieved through the level of assurance (see table below). |
||
|
HUMAN ERROR |
LEVEL of ASSURANCE |
|||
|
Low |
Medium |
High |
||
|
OSO #18 Automatic protection of the flight envelope from human errors |
Criteria |
The automatic protection of the flight envelope has been developed in-house or out of the box (e.g. using commercial off‑the‑shelf elements), without following specific standards.
|
The competent authority should request the applicant to use a UAS for which EASA has verified the claimed integrity through a DVR. |
The competent authority should request the applicant to use a UAS for which EASA has issued a type certificate or restricted type certificate in accordance with Annex I (Part 21) to Regulation (EU) No 748/2012. |
|
Comments |
N/A |
N/A |
N/A |
|
OSO #19 — Safe recovery from human errors
(a) This OSO addresses the risk of human errors which may affect the safety of the operation if not prevented or detected and recovered in a timely fashion.
i) Errors can be made by anyone involved in the operation.
ii) An example could be a human error leading to the incorrect loading of the payload, with the risk of it falling off the UA during the operation.
iii) Another example could be a human error not to extend the antenna mast, thus reducing the C2 link coverage.
Note: the flight envelope protection is excluded from this OSO since it is specifically covered by OSO #18.
(b) This OSO covers:
i) procedures and lists,
ii) training, and
iii) UAS design, i.e. systems detecting and/or recovering from human errors (e.g. safety pins, use of acknowledgment features, fuel or energy consumption monitoring functions …)
|
HUMAN ERROR |
LEVEL of INTEGRITY |
|||
|
Low |
Medium |
High |
||
|
OSO #19 Safe recovery from Human Error |
Criterion #1 (Procedures and checklists) |
Procedures and checklists that mitigate the risk of potential human errors from any person involved with the mission are defined and used. Procedures provide at a minimum: — a clear distribution and assignment of tasks, and — an internal checklist to ensure staff are adequately performing their assigned tasks. |
||
|
Comments |
N/A |
N/A |
N/A |
|
|
Criterion #2 (Training) |
— The remote crew1 is trained to use procedures and checklists. — The remote crew1 receives CRM2 training.3 |
|||
|
Comments |
1 In the context of SORA, the term ‘remote crew’ refers to any person involved in the mission. 2 CRM training focuses on the effective use of all the remote crew to ensure a safe and efficient operation, reducing error, avoiding stress and increasing efficiency. 3 The distinction between a low, a medium and a high level of robustness for this criterion is achieved through the level of assurance (see table below). |
|||
|
Criterion #3 (UAS design) |
Systems detecting and/or recovering from human errors are developed according to industry best practices. |
Systems detecting and/or recovering from human errors are developed to standards considered adequate by the competent authority and/or in accordance with a means of compliance acceptable to that authority. |
Same as medium. |
|
|
Comments |
N/A |
N/A |
N/A |
|
|
HUMAN ERROR |
LEVEL of ASSURANCE |
|||
|
Low |
Medium |
High |
||
|
OSO #19 Safe recovery from human error |
Criterion #1 (Procedures and checklists) |
(a) Procedures and checklists are not validated against either a standard or a means of compliance considered adequate by the competent authority of the MS. (b) The adequacy of the procedures and checklists is declared. |
(a) Procedures and checklists are validated against standards considered adequate by the competent authority of the MS and/or in accordance with the means of compliance acceptable to that authority1. (b) The adequacy of the procedures and checklists is proven through: (1) dedicated flight tests, or (2) simulation, provided that the representativeness of the simulation means is proven valid for the intended purpose with positive results; or (3) any other means acceptable to the competent authority of the MS. |
Same as medium. In addition: (a) Flight tests performed to validate the procedures and checklists cover the complete flight envelope or are proven to be conservative. (b) The procedures, checklists, flight tests and simulations are validated by the competent authority of the MS or an entity that is designated by the competent authority. |
|
Comments |
N/A |
1 AMC2 UAS.SPEC.030(3)(e) (Operational procedures for medium and high levels of robustness) is considered an acceptable means of compliance. |
N/A |
|
|
Criterion #2 (Training) |
Consider the criteria defined for the level of assurance of the generic remote crew training OSO (i.e. OSO #09, OSO #15 and OSO #22) corresponding to the SAIL of the operation. |
|||
|
Comments |
N/A |
N/A |
N/A |
|
|
Criterion #3 (UAS design) |
The applicant declares that the required level of integrity has been achieved1. |
The applicant has supporting evidence that the required level of integrity is achieved. That evidence is provided through testing, analysis, simulation2, inspection, design review or operational experience. If the operation is classified as SAIL IV, the competent authority should request the applicant to use a UAS for which EASA has verified the claimed integrity through a DVR. If the operation is classified as SAIL V the competent authority should request the applicant to use a UAS for which EASA has issued a type certificate or restricted type certificate in accordance with Annex I (Part 21) to Regulation (EU) No 748/2012. |
The competent authority should request the applicant to use a UAS for which EASA has issued a type certificate or restricted type certificate in accordance with Annex I (Part 21) to Regulation (EU) No 748/2012. |
|
|
Comments |
1 Supporting evidence may or may not be available. |
2 When simulation is performed, the validity of the targeted environment that is used in the simulation needs to be justified. |
N/A |
|
|
HUMAN ERROR |
LEVEL of INTEGRITY |
|||
|
Low |
Medium |
High |
||
|
OSO #20 A Human Factors evaluation has been performed and the HMI found appropriate for the mission |
Criteria |
The UAS information and control interfaces are clearly and succinctly presented and do not confuse, cause unreasonable fatigue, or contribute to remote crew errors that could adversely affect the safety of the operation. |
||
|
Comments |
If an electronic means is used to support potential VOs in their role to maintain awareness of the position of the unmanned aircraft, its HMI: — is sufficient to allow the VOs to determine the position of the UA during operation; and — does not degrade the VO’s ability to: — scan the airspace visually where the unmanned aircraft is operating for any potential collision hazard; and — maintain effective communication with the remote pilot at all times. |
|||
|
HUMAN ERROR |
LEVEL of ASSURANCE |
|||
|
Low |
Medium |
High |
||
|
OSO #20 A Human Factors evaluation has been performed and the HMI has been found appropriate for the mission |
Criteria |
The applicant conducts a human factors evaluation of the UAS to determine whether the HMI is appropriate for the mission. The HMI evaluation is based on inspection or analyses.
|
Same as Low but the HMI evaluation is based on demonstrations or simulations.1 The competent authority should request EASA to witness the HMI evaluation of the UAS. |
Same as Medium. In addition, EASA witnesses the HMI evaluation of the UAS and the competent authority of the MS or an entity that is designated by the competent authority witnesses the HMI evaluation of the possible electronic means used by the AO. |
|
Comments |
N/A |
1 When simulation is performed, the validity of the targeted environment that is used in the simulation needs to be justified. |
N/A |
|
E.8 OSOs related to adverse operating conditions
OSO #23 — Environmental conditions for safe operations are defined, measurable and adhered to
|
ADVERSE OPERATING CONDITIONS |
LEVEL of INTEGRITY |
|||
|
Low |
Medium |
High |
||
|
OSO #23 Environmental conditions for safe operations are defined, measurable and adhered to |
Criterion #1 (Definition) |
The environmental conditions for safe operations are defined and reflected in the flight manual or equivalent document.1 |
||
|
Comments |
1 The distinction between a low, a medium and a high level of robustness for this criterion is achieved through the level of assurance (see table below). |
|||
|
Criterion #2 (Procedures) |
Procedures to evaluate environmental conditions before and during the mission (i.e. real-time evaluation) are available and include assessment of meteorological conditions (METAR, TAFOR, etc.) with a simple recording system.2 |
|||
|
Comments |
2 The distinction between a low, a medium and a high level of robustness for this criterion is achieved through the level of assurance (see table below). |
|||
|
Criterion #3 (Training) |
Training covers assessment of meteorological conditions.3 |
|||
|
Comments |
3 The distinction between a low, a medium and a high level of robustness for this criterion is achieved through the level of assurance (see table below). |
|||
|
ADVERSE OPERATING CONDITIONS |
LEVEL of ASSURANCE |
|||
|
Low |
Medium |
High |
||
|
OSO #23 Environmental conditions for safe operations defined, measurable and adhered to |
Criterion #1 (Definition) |
The applicant declares that the required level of integrity has been achieved. |
The applicant has supporting evidence that the required level of integrity is achieved. This is typically done by testing, analysis, simulation, inspection, design review or through operational experience. If the operation is classified as SAIL IV, the competent authority should request the applicant to use a UAS for which EASA has issued a DVR. |
The competent authority should request the applicant to use a UAS for which EASA has issued a type certificate or restricted type certificate in accordance with Annex I (Part 21) to Regulation (EU) No 748/2012 |
|
Comments |
N/A |
|||
|
Criterion #2 (Procedures) |
(a) Procedures do not require validation against either a standard or a means of compliance considered adequate by the competent authority of the MS. (b) The adequacy of the procedures and checklists is declared. |
(a) Procedures are validated against standards considered adequate by the competent authority of the MS and/or in accordance with the means of compliance acceptable to that authority1. (b) The adequacy of the procedures is proven through: (1) dedicated flight tests, or (2) simulation, provided that the representativeness of the simulation means is proven valid for the intended purpose with positive results; or (3) any other means acceptable to the competent authority of the MS. |
Same as medium. In addition: (a) Flight tests performed to validate the procedures cover the complete flight envelope or are proven to be conservative. (b) The procedures, flight tests and simulations are validated by the competent authority of the MS or an entity that is designated by the competent authority. |
|
|
Comments |
N/A |
1 AMC2 UAS.SPEC.030(3)(e) (Operational procedures for medium and high levels of robustness) is considered an acceptable means of compliance. |
N/A |
|
|
Criterion #3 (Training) |
Training is self-declared (with evidence available). |
— Training syllabus is available. — The UAS operator provides competency-based, theoretical and practical training. |
The competent authority of the MS or an entity that is designated by the competent authority: — validates the training syllabus; and — verifies the remote crew competencies. |
|
|
Comments |
N/A |
N/A |
N/A |
|
(a) To assess the integrity of this OSO, the applicant determines:
(1) whether credit can be taken for the equipment environmental qualification tests / declarations, e.g. by answering the following questions:
(i) Is there a Declaration of Design and Performance (DDP) available to the applicant stating the environmental qualification levels to which the equipment was tested?
(ii) Did the environmental qualification tests follow a standard considered adequate by the competent authority (e.g. DO-160)?
(iii) Are the environmental qualification tests appropriate and sufficient to cover all the environmental conditions related to the ConOps?
(iv) If the tests were not performed following a recognised standard, were the tests performed by an organisation/entity that is qualified or that has experience in performing DO-160 like tests?
(2) Can the suitability of the equipment for the intended/expected UAS environmental conditions be determined from either in-service experience or relevant test results?
(3) Any limitations which would affect the suitability of the equipment for the intended/expected UAS environmental conditions.
(b) The lowest integrity level should be considered for those cases where a UAS equipment has only a partial environmental qualification and/or a partial demonstration by similarity and/or parts with no qualification at all.
|
ADVERSE OPERATING CONDITIONS |
LEVEL of INTEGRITY |
|||
|
N/A |
Medium |
High |
||
|
OSO #24 UAS is designed and qualified for adverse environmental conditions |
Criteria |
N/A |
The UAS is designed to limit the effect of environmental conditions. |
The UAS is designed using environmental standards considered adequate by the competent authority and/or in accordance with a means of compliance acceptable to that authority. |
|
Comments |
N/A |
N/A |
N/A |
|
|
ADVERSE OPERATING CONDITIONS |
LEVEL of ASSURANCE |
|||
|
N/A |
Medium |
High |
||
|
OSO #24 UAS is designed and qualified for adverse environmental conditions |
Criteria |
N/A |
The applicant has supporting evidence that the required level of integrity has been achieved. This is typically done by testing, analysis, simulation2, inspection, design review or through operational experience. |
If the operation is classified as SAIL IV, the competent authority should request the applicant to use a UAS for which EASA has issued a DVR. If the operation is classified SAIL V or VI, the competent authority should request the applicant to use a UAS for which EASA has issued a type certificate or restricted type certificate in accordance with Annex I (Part 21) to Regulation (EU) No 748/2012. |
|
Comments |
N/A |
2 When simulation is performed, the validity of the targeted environment that is used in the simulation needs to be justified |
N/A |
|
PREDEFINED RISK ASSESSMENT PDRA-G01 Version 1.3
EDITION September 2023
This PDRA is the result of applying the methodology that is described in AMC1 Article 11 of the UAS Regulation to UAS operations that are conducted in the ‘specific’ category:
(1) with UA with maximum characteristic dimensions (e.g. wingspan, rotor diameter/area or maximum distance between rotors in case of multirotor) of up to 3 m and typical kinetic energy of up to 34 kJ;
(2) BVLOS of the remote pilot with visual air risk mitigation;
(3) over sparsely populated areas;
(4) less than 150 m (500 ft) above the surface overflown (or any other altitude reference defined by the Member State); and
(5) in uncontrolled airspace.
(b) PDRA characterisation and conditions
The characterisation and conditions for this PDRA are summarised in Table PDRA-G01.1 below:
|
Topic |
Method of proof |
Condition |
|||||
|
1. Operational characterisation (scope and limitations) |
|||||||
|
Level of human intervention |
Self-declaration |
1.1 No autonomous operations: the remote pilot should have the ability to maintain control of the UA, except in case of a loss of the command and control (C2) link. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||
|
1.2 The remote pilot should operate only one UA at a time. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
1.3 The remote pilot should not operate the UA from a moving vehicle. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
1.4 The remote pilot should not hand the control of the UA over to another command unit. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
UA range limit |
Self-declaration |
1.5 Launch/recovery: at VLOS distance from the remote pilot, if not operating from a safe prepared area. Note: ‘safe prepared area’ means a controlled ground area that is suitable for the safe launch/recovery of the UA. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||
|
1.6 In flight: 1.6.1 If no AOs are employed: the UA is not operated further than 1 km (or other distance defined by the competent authority) from the remote pilot. Note: The remote pilot’s workload should allow them to continuously visually scan the airspace. |
Please include a reference to the relevant chapter of the OM, otherwise indicate ‘n/a’. |
‘I declare compliance.’ or ‘n/a’ |
|||||
|
1.6.2 If AOs are employed: the range is not limited as long as the UA is not operated further than 1 km (unless a different distance is defined by the competent authority) from the AO who is nearest to the UA. |
Please include a reference to the relevant chapter of the OM, otherwise indicate ‘n/a’. |
‘I declare compliance.’ or ‘n/a’ |
|||||
|
Overflown areas |
Declaration supported by data |
1.7 UAS operations should be conducted over sparsely populated areas. |
Please include a reference to the relevant chapter of the OM where the procedures for determining the population density are provided. |
‘I declare compliance.’ Please describe how population density data is identified. |
|||
|
UA limitations |
Self-declaration |
1.8 Maximum characteristic dimensions (e.g. wingspan, rotor diameter/area or maximum distance between rotors in case of a multirotor): 3 m |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||
|
1.9 Typical kinetic energy (as defined in paragraph 2.3.1(k) of AMC1 to Article 11 of the UAS Regulation: up to 34 kJ |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
Flight height limit |
Self-declaration |
1.10 The maximum height of the operational volume should not be greater than 150 m (500 ft) above the overflown area (or any other altitude reference defined by the Member State). Note: In addition to the vertical limit of the operational volume, an air risk buffer is to be considered (see ‘Air risk’ under point 3 of this table). |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||
|
Airspace |
Self-declaration |
1.11 The UA should be operated: |
|
||||
|
1.11.1 in uncontrolled airspace (corresponding to an air risk that can be classified as ARC-b); or |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
1.11.2 in a segregated area (corresponding to an air risk that can be classified as ARC‑a); or |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
1.11.3 as otherwise established by the Member States in accordance with Article 15 (with an associated air risk that can be classified as not higher than ARC-b). |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
Visibility |
Self-declaration |
1.12 The UA should be operated in an area where flight visibility is greater than 5 km. Note: Please refer to GM1 UAS.STS‑02.020(3). |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||
|
Others |
Self-declaration |
1.13 The UA should not be used to drop material or to carry dangerous goods, except for dropping items in connection with agricultural, horticultural or forestry activities where the carriage of such items does not contravene any other applicable regulations. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||
|
2. Operational risk classification (according to the classification defined in AMC1 to Article 11 of the UAS Regulation) |
|||||||
|
Final GRC |
3 |
Final ARC |
ARC-b |
SAIL |
II |
||
|
3. Operational mitigations |
|||||||
|
Operational volume (see Figure 2 of AMC1 Article 11) |
Self-declaration |
3.1 To determine the operational volume, the applicant should consider the position-keeping capabilities of the UAS in 4D space (latitude, longitude, height, and time). |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||
|
3.2 In particular, the accuracy of the navigation solution, the flight technical error of the UAS, as well as the flight path definition error (e.g. map error) and latencies should be considered and addressed when determining the operational volume. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
3.3 The remote pilot should apply emergency procedures as soon as there is an indication that the UA may exceed the limits of the operational volume. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
Ground risk |
Self-declaration |
3.4 The UAS operator should establish a ground risk buffer to protect third parties on the ground outside the operational volume. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||
|
3.4.1 The minimum criterion should be the use of the ‘1:1 rule’ (e.g. if the UA is planned to operate at a height of 150 m, the ground risk buffer should at least be 150 m). |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
3.5 The operational volume and the ground risk buffer should be all contained in a sparsely populated area. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
3.6 The applicant should evaluate the area of operations typically by means of an on-site inspection or appraisal, and should be able to justify a lower density of people at risk in the operational area and the ground risk buffer. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
Air risk |
Self-declaration |
3.7 The UAS operator should establish an air risk buffer to protect third parties in the air outside the operational volume. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||
|
3.8 This air risk buffer should be contained in an ‘airspace that meets the conditions defined in 1.11 and over sparsely populated areas. If the operation is limited at a height below 120 m, no additional vertical air risk buffer is required. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ If the height of the operation is above 120 m and up to 150 m, please add the following: ‘Supporting evidence is included in the OM.’ ‘Justification supporting the appropriate air risk buffer is documented in […].’ |
|||||
|
3.9 The operational volume should be outside any geographical zone corresponding to a flight restriction zone, as defined by the responsible authority, unless the UAS operator has been granted appropriate permission. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
3.10 Prior to the flight, the remote pilot should assess the proximity of the planned operation to manned aircraft activity. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
Declaration supported by |
3.11 If the UAS operation is performed above 120 m and up to 150 m, the UAS operator should develop appropriate procedures to not jeopardise other airspace users. |
Please include a reference to the relevant chapter/section of the OM. Please describe how the remote pilots and, if employed, the AOs are able to assess the height of the UA compared to other airspace users52 The UAS operator should demonstrate that they have sufficient confidence in the accuracy of the information about the height of the UA and the means to advert and avoid other airspace users and obstacles in the vicinity of the UA. |
‘I declare compliance and supporting evidence is included in the OM.’ |
||||
|
Observers53 Please refer to point UAS.STS-02.050 for the AO’s main responsibilities. |
Self-declaration |
3.12 If the UAS operator decides to employ one or more airspace observers (AOs), the remote pilot may operate the UA up to the distance that is specified in point 1.6.2. |
Please include a reference to the relevant chapter/section of the OM, otherwise indicate ‘n/a’. |
‘I declare compliance.’ or ‘n/a’ |
|||
|
3.13 The UAS operator should ensure the correct placement and the appropriate number of AOs along the intended flight path. Prior to each flight, the UAS operator should verify that: |
Please include a reference to the relevant chapter/section of the OM, otherwise indicate ‘n/a’. |
‘I declare compliance.’ or ‘n/a’ |
|||||
|
3.13.1 the visibility and the planned distance of the AOs are within the acceptable limits that are defined in the operations manual (OM); |
Please include a reference to the relevant chapter/section of the OM, otherwise indicate ‘n/a’. |
‘I declare compliance.’ or ‘n/a’ |
|||||
|
3.13.2 there are no potential terrain obstructions for each AO; |
Please include a reference to the relevant chapter/section of the OM, otherwise indicate ‘n/a’. |
‘I declare compliance.’ or ‘n/a’ |
|||||
|
3.13.3 there are no gaps between the zones that are covered by each of the AOs; |
Please include a reference to the relevant chapter/section of the OM, otherwise indicate ‘n/a’. |
‘I declare compliance.’ or ‘n/a’ |
|||||
|
3.13.4 communication with each AO is established and effective; and |
Please include a reference to the relevant chapter/section of the OM, otherwise indicate ‘n/a’. |
‘I declare compliance.’ or ‘n/a’ |
|||||
|
3.13.5 if means are used by the AOs to determine the position of the UA, those means are functioning and effective. Note: Instead of an AO, the remote pilot may perform the visual scan of the airspace, provided that the workload allows them to perform their duties. |
Please include a reference to the relevant chapter/section of the OM, otherwise indicate ‘n/a’. |
‘I declare compliance.’ or ‘n/a’ |
|||||
|
4. UAS operator and UAS operations conditions |
|||||||
|
UAS operator and UAS operations |
Declaration supported by |
4.1 The UAS operator should: |
|
|
|||
|
4.1.1 develop an operations manual (OM) (for the template, refer to AMC1 UAS.SPEC.030(3)(e) and to the complementary information in GM1 UAS.SPEC.030(3)(e)); |
Please describe how this condition is met. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
|||||
|
4.1.2 develop procedures to ensure that the security requirements applicable to the area of operations are complied with during in the intended operation; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
|||||
|
4.1.3 develop measures to protect the UAS against unlawful interference and unauthorised access; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
|||||
|
4.1.4 develop procedures to ensure that all operations comply with Regulation (EU) 2016/679 on the protection of natural persons with regard to the processing of personal data and on the free movement of such data; in particular, the UAS operator should carry out a data protection impact assessment, when this is required by the data protection national authority of the Member State with regard to the application of Article 35 of that Regulation; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
|||||
|
4.1.5 develop guidelines for its remote pilots to plan UAS operations in a manner that minimises nuisance, including noise and other emissionsrelated nuisance, to people and animals; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
|||||
|
4.1.6 develop an emergency response plan (ERP) in accordance with the conditions for a ‘medium’ level of robustness (please refer to AMC3 UAS.SPEC.030(3)(e); |
Please describe how this condition is met. |
‘I declare compliance and that the ERP is available to the competent authority for review.’ |
|||||
|
4.1.7 validate the operational procedures in accordance with the conditions for a ‘medium’ level of robustness, which are included in AMC2 UAS.SPEC.030(3)(e); |
Please describe how this condition is met. |
‘I declare compliance and that the description for meeting this condition is available to the competent authority for review.’ |
|||||
|
4.1.8 ensure the adequacy of the contingency and emergency procedures, and prove it through any of the following: (a) dedicated flight tests; or (b) simulations, provided that the representativeness of the simulation means is proven for the intended purpose with positive results; or (c) any other means acceptable to the competent authority; |
Please describe how this condition is met. |
‘I declare compliance and that the description for meeting this condition is available to the competent authority for review.’ |
|||||
|
4.1.9 have a policy that defines how the remote pilot and any other personnel in charge of duties essential to the UAS operation can declare themselves fit to operate before conducting any operation; |
Please describe how this condition is met. |
‘I declare compliance and that the description for meeting this condition is available to the competent authority for review. |
|||||
|
4.1.10 designate for each flight a remote pilot with adequate competency and other personnel in charge of duties essential to the UAS operation if needed; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
|||||
|
4.1.11 ensure that the UAS operation effectively uses and supports the efficient use of the radio spectrum in order to avoid harmful interference; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
|||||
|
4.1.12 keep for a minimum of 3 years and maintain up to date a record of the information on UAS operations, including any unusual technical or operational occurrences and other data as required by the declaration or by the operational authorisation. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance and that recordkeeping data is available to the competent authority for review.’ |
|||||
|
UAS maintenance |
Self-declaration |
4.2 The UAS operator should: |
|
|
|||
|
4.2.1 ensure that the UAS maintenance instructions that are defined by the UAS operator are included in the OM and cover at least the UAS manufacturer’s instructions and requirements, when applicable; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
4.2.2 ensure that the maintenance staff follow the UAS maintenance instructions when performing maintenance; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
4.2.3 keep for a minimum of 3 years and maintain up to date a record of the maintenance activities conducted on the UAS; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
4.2.4 establish and keep up to date a list of the maintenance staff employed by the UAS operator to carry out maintenance activities; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
4.2.5 comply with point UAS.SPEC.100, if the UAS uses certified equipment; |
Please include a reference to the relevant chapter/section of the OM or n/a. |
‘I declare compliance.’ or ‘n/a’ |
|||||
|
External services |
Self-declaration |
4.3 The UAS operator should ensure that the level of performance for any externally provided service that is necessary for the safety of the flight is adequate for the intended operation. The UAS operator should declare that this level of performance is adequately achieved. |
Please describe how this condition is met. |
‘I declare compliance.’ |
|||
|
4.4 The UAS operator should define and allocate the roles and responsibilities between the UAS operator and the external service provider(s), if applicable. |
Please describe how this condition is met. |
‘I declare compliance.’ |
|||||
|
5. Conditions for the personnel in charge of duties essential to the UAS operation |
|||||||
|
General |
Declaration supported by |
5.1 The UAS operator should ensure that all personnel in charge of duties essential to the UAS operation are provided with competency-based, theoretical and practical training specific to their duties, which consists of the applicable theoretical elements derived from AMC1 UAS.SPEC.050(1)(d), and practical elements from AMC2 UAS.SPEC.050(1)(d) and UAS.SPEC.050(1)(e). In addition, for non-remote pilots, also from AMC3 UAS.SPEC.050(1)(d). |
Please describe how this condition is met. |
‘I declare compliance.’ Evidence of training is available for inspection at the request of the competent authority or its authorised representative. The training programme is documented in the OM. |
|||
|
5.2 The UAS operator should keep and maintain up to date a record of all the relevant qualifications and training courses completed by the remote pilot and the other personnel in charge of duties essential to the UAS operation and by the maintenance staff for at least 3 years after those persons have ceased to be employed by the organisation or have changed position within the organisation. |
Please describe how this condition is met. |
‘I declare compliance.’ Record-keeping data is available for inspection at the request of the competent authority. |
|||||
|
Remote pilot |
Self-declaration |
5.3 The remote pilot should have the authority to cancel or delay any or all flight operations under the following conditions: |
|
|
|||
|
5.3.1 when the safety of persons is jeopardised; or |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
5.3.2 when property on the ground is jeopardised; or |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
5.3.3 when other airspace users are jeopardised; or |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
5.3.4 when there is a violation of the terms of the operational authorisation. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
5.4 If AOs are employed, the remote pilot should ensure that the necessary number of AOs is available and correctly placed, and that the communication with them can be adequately established. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
5.5 The remote pilot should: |
|
|
|||||
|
5.5.1 not perform duties under the influence of psychoactive substances or alcohol, or when they are unfit to perform their tasks due to injury, fatigue, medication, sickness or other causes; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
5.5.2 be familiar with the manufacturer’s instructions provided by the manufacturer of the UAS; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
5.5.3 ensure that the UA remains clear of clouds; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
5.5.4 perform unaided visual scan of the airspace and ensure that the AO(s) can perform the same, if required, to avoid any potential collision hazard; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
5.5.5 obtain updated information relevant to the intended operation about any geographical zones defined in accordance with Article 15 of the UAS Regulation; and |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
5.5.6 ensure that the UAS is in a safe condition to complete the intended flight safely, and if applicable, check whether the direct remote identification is active and up to date. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
Multi-crew cooperation (MCC) |
Self-declaration |
5.6 Where multi-crew cooperation (MCC) is required, the UAS operator should: |
|
|
|||
|
5.6.1 designate the remote pilot-in‑command to be responsible for each flight; |
Please include a reference to the relevant chapter/section of the OM, otherwise indicate ‘n/a’. |
‘I declare compliance.’ or ‘n/a’ |
|||||
|
5.6.2 include procedures to ensure coordination between the remote crew members through robust and effective communication channels; those procedures should cover, as a minimum: |
Please include a reference to the relevant chapter/section of the OM, otherwise indicate ‘n/a’. |
‘I declare compliance.’ or ‘n/a’ |
|||||
|
5.6.2.1 the assignment of tasks to the remote crew members; and |
Please include a reference to the relevant chapter/section of the OM, otherwise indicate ‘n/a’. |
‘I declare compliance.’ or ‘n/a’ |
|||||
|
5.6.2.2 the establishment of step-by‑step communication; and |
Please include a reference to the relevant chapter/section of the OM, otherwise indicate ‘n/a’. |
‘I declare compliance.’ or ‘n/a’ |
|||||
|
5.6.3 ensure that the training of the remote crew covers MCC. |
Please include a reference to the relevant chapter/section of the OM, otherwise indicate ‘n/a’. |
‘I declare compliance.’ or ‘n/a’ |
|||||
|
Maintenance staff |
Declaration supported by |
5.7 Any maintenance staff member that is authorised by the UAS operator to perform maintenance activities should have been adequately trained in the documented maintenance procedures |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance and that supporting evidence is included in the OM.’ Evidence of training is available at the request of the competent authority. |
|||
|
Personnel in charge of duties essential to the UAS operation are fit to operate |
Self-declaration |
5.8 The personnel in charge of duties essential to the UAS operation should declare that they are fit to operate before conducting any operation, based on the policy that is defined by the UAS operator. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||
|
6. Technical conditions |
|||||||
|
|
|
6.1 The UAS should be equipped with means to monitor the critical parameters of a safe flight, in particular the following: |
|
|
|||
|
6.1.1 the UA position, height or altitude, ground speed or airspeed, attitude and trajectory; |
Please include a reference to the relevant chapter/section of the OM. |
I declare compliance.’ |
|||||
|
6.1.2 the UAS energy status (fuel, battery charge, etc.); and |
Please include a reference to the relevant chapter/section of the OM. |
I declare compliance.’ |
|||||
|
6.1.3 the status of critical functions and systems; as a minimum, for services based on RF signals (e.g. C2 Link, GNSS, etc.), means should be provided to monitor the adequate performance and trigger an alert when the performance level becomes too low. |
Please include a reference to the relevant chapter/section of the OM. |
I declare compliance.’ |
|||||
|
6.2 The UA should have the performance capability to descend safely from its operating altitude to a ‘safe altitude’ in less than 1 minute, or have a descent rate of at least 2.5 m/s (500 fpm). |
Please include a reference to the relevant chapter/section of the OM. |
I declare compliance.’ |
|||||
|
Human–machine interface (HMI) |
Self-declaration |
6.3 The UAS information and control interfaces should be clearly and succinctly presented and should not confuse, cause unreasonable fatigue, or contribute to causing any disturbance to the personnel in charge of duties essential to the UAS operation in such a way that could adversely affect the safety of the operation. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||
|
6.4 If an electronic means is used to support AOs in their role of maintaining awareness of the position of the UA, its HMI should: |
|
|
|||||
|
6.4.1 be sufficiently easy to understand to allow AOs to determine the position of the UA during the operation; and |
Please include a reference to the relevant chapter/section of the OM, otherwise indicate ‘n/a’ |
‘I declare compliance.’ or ‘n/a’ |
|||||
|
6.4.2 not degrade the AOs’ ability to: |
|
|
|||||
|
6.4.2.1 perform unaided visual scan of the airspace where the UA is operating for any potential collision hazard; and |
Please include a reference to the relevant chapter/section of the OM, otherwise indicate ‘n/a’ |
‘I declare compliance.’ or ‘n/a’ |
|||||
|
6.4.2.2 maintain effective communication with the remote pilot at all times. |
Please include a reference to the relevant chapter/section of the OM, otherwise indicate ‘n/a’ |
‘I declare compliance.’ or ‘n/a’ |
|||||
|
6.5 The UAS operator should conduct a UAS evaluation that considers and addresses human factors to determine whether the HMI is appropriate for the operation. |
Please describe how this condition is met. |
‘I declare compliance.’ |
|||||
|
C2 links and communication |
Self-declaration |
6.6 The UAS should comply with the applicable requirements for radio equipment and the use of the RF spectrum. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||
|
6.7 Protection mechanisms against interference should be used, especially if unlicensed bands (e.g. ISM) are used for the C2 link (mechanisms such as FHSS, DSSS or OFDM technologies, or frequency deconfliction by procedure). |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
6.8 The UAS should be equipped with a C2 link that is protected against unauthorised access to the command‑and‑control functions. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
6.9 In case of a loss of the C2 link, the UAS should have a reliable and predictable method to recover the command‑and‑control link of the UA or to terminate the flight in a way that reduces any undesirable effect on third parties in the air or on the ground. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
6.10 Communication between the remote pilot and the AO(s) should allow the remote pilot to manoeuvre the UA with sufficient time to avoid any risk of collision with manned aircraft, in accordance with point UAS.SPEC.060(3)(b) of the UAS Regulation. |
Please describe how this condition is met. |
‘I declare compliance.’ |
|||||
|
Tactical mitigation |
Self-declaration |
6.11 The UAS design should be adequate to ensure that the time required between a command given by the remote pilot and the UA executing it does not exceed 5 seconds. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||
|
6.12 Where an electronic means is used to assist the remote pilot and/or AOs in being aware of the UA position in relation to potential ‘airspace intruders’, the information is provided with a latency and an update rate for intruder data (e.g. position, speed, altitude, track) that support the decision criteria. |
Please include a reference to the relevant chapter/section of the OM, otherwise indicate ‘n/a’. |
‘I declare compliance.’ or ‘n/a’ |
|||||
|
Containment |
Declaration supported by |
6.13 To ensure a safe recovery from a technical issue that involves the UAS or an external system that supports the operation, the UAS should comply with the following basic containment provisions: |
|
|
|||
|
6.13.1 no probable failure of the UAS or of any external system that supports the operation would lead to operation outside the operational volume; and |
Please describe how this condition is met |
‘n/a since enhanced containment applies.’ or ‘I declare compliance.’ ‘A design and installation appraisal is available and it covers at least: — the design and installation features (independence, separation, and redundancy); and — the particular risks (e.g. hail, ice, snow, electromagnetic interference, etc.) relevant to the type of operation.’ |
|||||
|
6.13.2 it is reasonably expected that a fatality will not occur due to any probable failure of the UAS or of any external system that supports the operation. |
Please describe how this condition is met |
||||||
|
6.14 The vertical extension of the operational volume should be 150 m above the surface (or any other reference altitude defined by the Member State). Note: The term ‘probable’ should be understood in its qualitative interpretation, i.e. ‘anticipated to occur one or more times during the entire system/operational life of an item’. |
Please describe how this condition is met |
||||||
|
Declaration supported by |
6.15 The following enhanced containment conditions should apply if the adjacent area includes an assembly of people or if the adjacent airspace is classified as ARC-d (in accordance with SORA): |
|
|
||||
|
6.15.1 The UAS should be designed to standards that are considered adequate by the competent authority and/or in accordance with a means of compliance that is acceptable to that competent authority such that: |
Please include a reference to the relevant chapter/section of the OM or indicate ‘n/a’. |
‘N/A since the basic containment applies’ or ‘I declare compliance with MoC Light-UAS.2511. Analysis and/or test data with supporting evidence is available.’ or ‘The UAS has a DVR demonstrating compliance with the enhanced containment requirements.’ |
|||||
|
6.15.1.1. the probability of the UA leaving the operational volume should be less than 10–4/FH; and |
Please include a reference to the relevant chapter/section of the OM or indicate ‘n/a’. |
||||||
|
6.15.1.2 no single failure of the UAS or of any external system that supports the operation should lead to operation outside the ground risk buffer. Note: The term ‘failure’ should be understood as an occurrence that affects the operation of a component, part, or element in such a way that it can no longer function as intended. Errors may cause failures but are not considered to be failures. Some structural or mechanical failures may be excluded from this criterion if it can be shown that these mechanical parts were designed according to aviation industry best practices. |
Please include a reference to the relevant chapter/section of the OM or indicate ‘n/a’. |
||||||
|
6.15.2 SW and AEH whose development error(s) could directly lead to operations outside the ground risk buffer should be developed according to an industry standard or methodology that is recognised as adequate by EASA. Note 1: The proposed additional safety conditions cover both the integrity and the assurance levels. Note 2: The proposed additional safety conditions do not imply a systematic need to develop the SW and AEH according to an industry standard or methodology that is recognised as adequate by the competent authority. For instance, if the UA design includes an independent engine shutdown function that systematically prevents the UA from exiting the ground risk buffer due to single failures or an SW/AEH error of the flight controls from occurring, the intent of the conditions of point 6.15.1 above could be considered met. |
Please include a reference to the relevant chapter/section of the OM or indicate ‘n/a’. |
||||||
|
Self-declaration |
6.16 The UAS has a unique serial number compliant with standard ANSI/CTA2063‑A‑2019, Small Unmanned Aerial Systems Serial Numbers, 2019, according to Article 40(4) of Regulation (EU) 2019/945. |
Please describe how this condition is met. |
I declare compliance.’ |
||||
|
6.17 the UAS is equipped with a remote identification system according to Article 40(5) of Regulation (EU) 2019/945. |
Please describe how this condition is met. |
I declare compliance.’ |
|||||
|
Self-declaration |
6.18 If the UAS is operated at night, it is equipped with at least one green flashing light according to point UAS.SPEC.050(1)(l)(i) of the UAS Regulation. |
Please describe how this condition is met. |
‘I declare compliance.’ or ‘n/a’ |
||||
Table PDRA-G01.1 — Main limitations and conditions for PDRA-G01
AMC3 Article 11 Rules for conducting an operational risk assessment
ED Decision 2023/012/R
PREDEFINED RISK ASSESSMENT PDRA-G02 Version 1.2
EDITION September 2023
(a) Scope
This PDRA is the result of applying the methodology that is described in AMC1 to Article 11 of the UAS Regulation to UAS operations conducted in the ‘specific’ category with the following main attributes:
(1) UA with maximum characteristic dimensions (e.g. wingspan, rotor diameter/area or maximum distance between rotors in case of a multirotor) of up to 3 m and typical kinetic energies of up to 34 kJ;
(2) BVLOS of the remote pilot;
(3) over sparsely populated areas;
(4) in airspace that is reserved or segregated for the UAS operation, corresponding to an air risk that can be classified as ARC-a.
(5) within the range of the direct C2 link56 Due to the lack of experience in the use of communication services for extending the C2 link coverage through communication networks (e.g. mobile networks) in the type of UAS operations that are addressed by this PDRA, the scope of the PDRA is initially limited to the coverage of a direct C2 Link (direct link between the control station and the UA). As more experience in the use of those communication services is gained, the conditions of this PDRA may be revised to encompass their uses. (radio line of sight) up to the height of the upper boundary of the reserved airspace.
(b) PDRA characterisation and conditions
The characterisation and conditions for this PDRA are summarised in Table PDRA-G02.1 below.
|
Topic |
Method of proof |
Condition |
||||||
|
1. Operational characterisation (scope and limitations) |
||||||||
|
Level of human intervention |
Self-declaration |
1.1 No autonomous operations: the remote pilot should have the ability to maintain control of the UA, except in case of a loss of the command‑and‑control (C2) link. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||
|
1.2 The remote pilot should operate only one UA at a time. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
1.3 The remote pilot should not operate the UA from a moving vehicle. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
1.4 The remote pilot should not hand the control of the UA over to another command unit. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
UA range limit |
Self-declaration |
1.5 Launch/recovery: At VLOS distance from the remote pilot, if not operating from a safe prepared area. Note: ‘safe prepared area’ means a controlled ground area that is suitable for the safe launch/recovery of the UA. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||
|
1.6 In flight: The range limit should be within the coverage of the direct C2 link coverage (radio line of sight), which ensures the safe conduct of the flight. |
Please include a reference to the relevant chapter/section of the OM, otherwise indicate ‘n/a’. |
‘I declare compliance.’ or ‘n/a’ |
||||||
|
Overflown areas |
Declaration supported by |
1.7 UAS operations should be conducted over sparsely populated areas. |
Please include a reference to the relevant chapter/section of the OM where the procedures for determining the population density are provided. |
‘I declare compliance.’ Please describe how the population density data is identified. |
||||
|
UA limitations |
Self-declaration |
1.8 Maximum characteristic dimension (e.g. wingspan, rotor diameter/area or maximum distance between rotors in case of a multirotor): 3 m |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||
|
1.9 Typical kinetic energy (as defined in paragraph 2.3.1(k) of AMC1 to Article 11 of the UAS Regulation: up to 34 kJ |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
Flight height limit |
Self-declaration |
1.10 The maximum height of the operation volume is limited by the size of the reserved or segregated airspace. Note: In addition to the vertical limit of the operational volume, an air risk buffer is to be considered (see ‘Air risk’ under point 3 of this table). |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||
|
Airspace |
Self-declaration |
1.11 Operations should only be conducted in airspace that is reserved or segregated for the purpose of conducting UAS operations (corresponding to an air risk that can be classified as ARC-a). |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||
|
Visibility |
Self-declaration |
1.12 If take-off and landing are conducted in VLOS of the remote pilot, the visibility should be sufficient to ensure that no people are in danger during the take‑off/landing phase. The remote pilot should abort the take-off or landing in case people on the ground are in danger. |
Please include a reference to the relevant chapter/section of the OM, otherwise indicate ‘n/a’. |
‘I declare compliance.’ or ‘n/a’ |
||||
|
Others |
Self-declaration |
1.13 The UA should not be used to drop material or to carry dangerous goods, except for dropping items in connection with agricultural, horticultural or forestry activities where the carriage of such items does not contravene any other applicable regulations. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||
|
2. Operational risk classification (according to the classification defined in AMC1 to Article 11 of the UAS Regulation) |
||||||||
|
Final GRC |
3 |
Final ARC |
ARC-a |
SAIL |
II |
|||
|
3. Operational mitigations |
||||||||
|
Operational volume |
Self-declaration |
3.1 To determine the operational volume, the UAS operator should consider the position-keeping capabilities of the UAS in 4D space (latitude, longitude, height, and time). |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||
|
3.2 In particular, the accuracy of the navigation solution, the flight technical error of the UAS, as well as the flight path definition error (e.g. map error) and latencies should be considered and addressed when determining the operational volume. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
3.3 The remote pilot should apply the emergency procedures as soon as there is an indication that the UA may exceed the limits of the operational volume. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
Ground risk |
Self-declaration |
3.4 The UAS operator should establish a ground risk buffer to protect third parties on the ground outside the operational volume. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||
|
3.4.1 The minimum criterion should be the use of the ‘1:1 rule’ (e.g. if the UA is planned to operate at a height of 150 m, the ground risk buffer should at least be 150 m). |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
3.5 The operational volume and the ground risk buffer should be all contained in a sparsely populated area. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
3.6 The applicant should evaluate the area of operations typically by means of an on‑site inspection or appraisal, and should be able to justify a reduced density of people at risk in the operational area and the ground risk buffer. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
Air risk |
Self-declaration |
3.7 The operational volume, including the air risk buffer, if applicable, should be entirely contained in the reserved or segregated airspace. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||
|
Observers |
|
n/a |
|
|
||||
|
4. UAS operator and UAS operations conditions |
||||||||
|
UAS operator and UAS operations |
Declaration supported by |
4.1 The UAS operator should: |
|
|
||||
|
4.1.1 develop an operations manual (OM) (for the template, refer to AMC1 UAS.SPEC.030(3)(e) and to the complementary information in GM1 UAS.SPEC.030(3)(e)); |
Please describe how this condition is met. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
||||||
|
4.1.2 develop procedures to ensure that the security requirements applicable to the area of operations are complied during the intended operation; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
||||||
|
4.1.3 develop measures to protect the UAS against unlawful interference and unauthorised access; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
||||||
|
4.1.4 develop procedures to ensure that all operations comply with Regulation (EU) 2016/679 on the protection of natural persons with regard to the processing of personal data and on the free movement of such data; in particular, the UAS operator should carry out a data protection impact assessment, when this is required by the data protection national authority of the Member State with regard to the application of Article 35 of that Regulation; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
||||||
|
4.1.5 develop guidelines for its remote pilots to plan UAS operations in a manner that minimises nuisance, including noise and other emissions‑related nuisance, to people and animals; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
||||||
|
4.1.6 develop an emergency response plan (ERP) in accordance with the conditions for a ‘medium’ level of robustness (please refer to AMC3 UAS.SPEC.030(3)(e); |
Please describe how this condition is met. |
‘I declare compliance and that the ERP is available to the competent authority for review.’ |
||||||
|
4.1.7 validate the operational procedures in accordance with the conditions for a ‘medium’ level of robustness, which are included in AMC2 UAS.SPEC.030(3)(e); |
Please describe how this condition is met. |
‘I declare compliance and that the ERP is available to the competent authority for review.’ |
||||||
|
4.1.8 ensure the adequacy of the contingency and emergency procedures and prove it through any of the following: (a) dedicated flight tests; or (b) simulations, provided that the representativeness of the simulation means is proven for the intended purpose with positive results; or (c) any other means acceptable to the competent authority; and |
Please describe how this condition is met. |
‘I declare compliance and that the description for meeting this condition is available to the competent authority for review.’ |
||||||
|
4.1.9 have a policy that defines how the remote pilot and any other personnel in charge of duties essential to the UAS operation can declare themselves fit to operate before conducting any operation. |
Please describe how this condition is met. |
‘I declare compliance and that the description for meeting this condition is available to the competent authority for review.’ |
||||||
|
4.1.10 designate for each flight a remote pilot with adequate competency and other personnel in charge of duties essential to the UAS operation if needed; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
||||||
|
4.1.11 ensure that the UAS operation effectively uses and supports the efficient use of the radio spectrum in order to avoid harmful interference; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
||||||
|
4.1.12 keep for a minimum of 3 years and maintain up to date a record of the information on UAS operations, including any unusual technical or operational occurrences and other data as required by the declaration or by the operational authorisation; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance and that recordkeeping data is available to the competent authority.’ |
||||||
|
4.1.13 As part of the procedures contained in the OM (point 4.1.1 above), include the description of the following: |
|
|
||||||
|
(a) The method and means of communication with the authority or entity responsible for the management of the airspace during the entire period of the reserved or segregated airspace being active, as mandated by the authorisation. Note: The communication method should be published in the NOTAM activating the reserved airspace to also allow coordination with manned aircraft. |
Please describe how this condition is met |
‘I declare compliance and that evidence is available to the competent authority for review.’ |
||||||
|
(b) The member(s) of personnel in charge of duties essential to the UAS operation, who are responsible for establishing that communication. |
Please describe how this condition is met |
‘I declare compliance and that evidence is available to the competent authority for review.’ |
||||||
|
UAS maintenance |
Self-declaration |
4.2 The UAS operator should: |
|
|
||||
|
4.2.1 ensure that the UAS maintenance instructions that are defined by the UAS operator are included in the OM and cover at least the UAS manufacturer’s instructions and requirements when applicable; and |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
4.2.2 ensure that the maintenance staff follow the UAS maintenance instructions when performing maintenance. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
4.2.3 keep for a minimum of 3 years and maintain up to date a record of the maintenance activities conducted on the UAS; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
4.2.4 establish and keep up to date a list of the maintenance staff employed by the operator to carry out maintenance activities; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
4.2.5 comply with point UAS.SPEC.100, if the UAS uses certified equipment. |
Please include a reference to the relevant chapter/section of the OM or indicate ‘n/a’. |
I declare compliance.’ or ‘n/a’ |
||||||
|
External services |
Self-declaration |
4.3 The UAS operator should ensure that the level of performance for any externally provided service that is necessary for the safety of the flight is adequate for the intended operation. The UAS operator should declare that this level of performance is adequately achieved. |
Please describe how this condition is met. |
‘I declare compliance.’ |
||||
|
4.4 The UAS operator should define and allocate the roles and responsibilities between the UAS operator and the external service provider(s), if applicable. |
Please describe how this condition is met. |
‘I declare compliance.’ |
||||||
|
5. Conditions for the personnel in charge of duties essential to the UAS operation |
||||||||
|
General |
Self-declaration |
5.1 The UAS operator should ensure that all personnel in charge of duties essential to the UAS operation are provided with competency-based theoretical and practical training specific to their duties, which consists of the applicable theoretical elements derived from AMC1 UAS.SPEC.050(1)(d) and practical elements from AMC2 UAS.SPEC.050(1)(d) and UAS.SPEC.050(1)(e). |
Please describe this condition is met. |
‘I declare compliance. Evidence of training are available for inspection at the request of the competent authority or its authorised representative. The training programme is documented in xxx’. |
||||
|
5.2 The UAS operator should keep and maintain up to date a record of all the relevant qualifications and training courses completed by the remote pilot and the other personnel in charge of duties essential to the UAS operation and by the maintenance staff for at least 3 years after those persons have ceased to be employed by the organisation or have changed position within the organisation. |
Please describe how this condition is met. |
‘I declare compliance.’ Record-keeping data is available for inspection at the request of the competent authority. |
||||||
|
Remote pilot |
Self-declaration |
5.3 The remote pilot should have the authority to cancel or delay any or all flight operations under the following conditions: |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||
|
5.3.1 when the safety of persons is jeopardised; or |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
5.3.2 when property on the ground is jeopardised; or |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
5.3.3 when other airspace users are jeopardised; or |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
5.3.4 when there is a violation of the terms of the operational authorisation. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
|
|
5.4 The remote pilot should: |
|
|
||||
|
5.4.1 not perform duties under the influence of psychoactive substances or alcohol, or when they are unfit to perform their tasks due to injury, fatigue, medication, sickness or other causes; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
5.4.2 be familiar with the manufacturer’s instructions provided by the manufacturer of the UAS; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
5.4.3 obtain updated information relevant to the intended operation about any geographical zones defined in accordance with Article 15; and |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
5.4.4 ensure that the UAS is in a safe condition to complete the intended flight safely and, if applicable, check whether the direct remote identification is active and up to date. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
Multi-crew cooperation (MCC) |
Self-declaration |
5.5 Where multi-crew cooperation (MCC) may be required, the UAS operator should: |
|
|
||||
|
5.5.1 designate a remote pilot-in-command to be responsible for each flight; |
Please include a reference to the relevant chapter/section of the OM, otherwise indicate ‘n/a’. |
‘I declare compliance.’ or ‘n/a’ |
||||||
|
5.5.2 include procedures to ensure coordination between the remote crew members through robust and effective communication channels; those procedures should cover, as a minimum: |
Please include a reference to the relevant chapter/section of the OM, otherwise indicate ‘n/a’. |
‘I declare compliance.’ or ‘n/a’ |
||||||
|
5.5.2.1 the assignment of tasks to the remote crew members; and |
Please include a reference to the relevant chapter/section of the OM, otherwise indicate ‘n/a’. |
‘I declare compliance.’ or ‘n/a’ |
||||||
|
5.5.2.2 the establishment of step-by-step communication; and |
Please include a reference to the relevant chapter/section of the OM, otherwise indicate ‘n/a’. |
‘I declare compliance.’ or ‘n/a’ |
||||||
|
5.6 ensure that the training of the remote crew covers MCC. |
Please include a reference to the relevant chapter/section of the OM, otherwise indicate ‘n/a’. |
‘I declare compliance.’ or ‘n/a’ |
||||||
|
Maintenance staff |
Declaration supported by |
5.7 Any staff member that is authorised by the UAS operator to perform maintenance activities should have been adequately trained in the documented maintenance procedures. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance and that supporting evidence is included in the OM.’ Evidence of training is available at the request of the competent authority. |
||||
|
Personnel in charge of duties essential to the UAS operation are fit to operate |
|
5.8 The personnel in charge of duties essential to the UAS operation should declare that they are fit to operate before conducting any operation, based on the policy that is defined by the UAS operator. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||
|
6. Technical conditions |
||||||||
|
General |
Self-declaration |
6.1 The UAS should be equipped with means to monitor the critical parameters of a safe flight, in particular the following: |
|
|
||||
|
6.1.1 the UA position, height or altitude, ground speed or airspeed, attitude, and trajectory; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
6.1.2 the UAS energy status (fuel, battery charge, etc.); and |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
6.1.3 the status of critical functions and systems; as a minimum, for services based on RF signals (e.g. C2 link, GNSS, etc.), means should be provided to monitor the adequate performance and trigger an alert when the performance level becomes too low. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
Human–machine interface (HMI) |
Self-declaration |
6.2 The UAS information and control interfaces should be clearly and succinctly presented and should not confuse, cause unreasonable fatigue, or contribute to causing any disturbance to the personnel in charge of duties essential to the UAS operation in such a way that could adversely affect the safety of the operation. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||
|
6.3 The UAS operator should conduct a UAS evaluation that considers and addresses human factors to determine whether the HMI is appropriate for the operation. |
Please describe how this condition is met. |
‘I declare compliance.’ |
||||||
|
C2 links and communication |
Self-declaration |
6.4 The UAS should comply with the applicable requirements for radio equipment and the use of the RF spectrum. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||
|
6.5 Protection mechanisms against interference should be used, especially if unlicensed bands (e.g. ISM) are used for the C2 link (mechanisms such as FHSS, DSSS or OFDM technologies, or frequency deconfliction by procedure). |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
6.6 The UAS should be equipped with a C2 link that is protected against unauthorised access to the command‑and‑control functions. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
6.7 In case of loss of the C2 link, the UAS should have a reliable and predictable method to recover the command‑and‑control link of the UA or to terminate the flight in a way that reduces any undesirable effect on third parties in the air or on the ground. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
6.8 The UAS operator should ensure that reliable and continuous means of two-way communication for the purpose that is indicated in point 4.1.13(a) above are available. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
Tactical mitigation |
|
n/a |
||||||
|
Containment |
Declaration supported by |
6.9 To ensure a safe recovery from a technical issue that involves the UAS or an external system that supports the operation, the UAS should comply with the following basic containment provisions: |
|
|
||||
|
6.9.1 no probable failure of the UAS or of any external system that supports the operation would lead to operation outside the operational volume; and |
Please describe how this condition is met |
‘n/a since enhanced containment applies.’ or ‘I declare compliance.’ ‘A design and installation appraisal is available and it covers at least: — the design and installation features (independence, separation, and redundancy); and — the particular risks (e.g. hail, ice, snow, electromagnetic interference, etc.) relevant to the type of operation. ’ |
||||||
|
6.9.2 it is reasonably expected that a fatality will not occur due to any probable failure of the UAS or of any external system that supports the operation. Note: The term ‘probable’ should be understood in its qualitative interpretation, i.e. ‘anticipated to occur one or more times during the entire system/operational life of an item’. |
Please describe how this condition is met |
|||||||
|
Declaration supported by |
6.10 The following enhanced containment conditions should apply if the adjacent area includes an assembly of people or if the adjacent airspace is classified as ARC-d (in accordance with SORA): |
|
|
|||||
|
6.10.1 The UAS should be designed to standards that are considered adequate by the competent authority and/or in accordance with a means of compliance that is acceptable to that competent authority such that: |
Please include a reference to the relevant chapter/section of the OM, otherwise indicate ‘n/a’. |
‘n/a since basic containment applies.’ or ‘I declare compliance with MoC Light-UAS.2511. Analysis and/or test data with supporting evidence is available.’ or ‘The UAS has a DVR demonstrating compliance with the enhanced containment requirements.’ |
||||||
|
6.10.1.1. the probability of the UA leaving the operational volume should be less than 10–4/FH; and |
Please include a reference to the relevant chapter/section of the OM, otherwise indicate ‘n/a’. |
|||||||
|
6.10.1.2 no single failure of the UAS or of any external system that supports the operation should lead to operation outside the ground risk buffer. Note: The term ‘failure’ should be understood as an occurrence that affects the operation of a component, part, or element in such a way that it can no longer function as intended. Errors may cause failures but are not considered to be failures. Some structural or mechanical failures may be excluded from the criterion if it can be shown that these mechanical parts were designed according to aviation industry best practices. |
Please include a reference to the relevant chapter/section of the OM, otherwise indicate ‘n/a’. |
|||||||
|
6.10.2 SW and AEH whose development error(s) could directly lead to operations outside the ground risk buffer should be developed according to an industry standard or methodology that is recognised as adequate by EASA. Note 1: The proposed additional safety conditions cover both the integrity and the assurance levels. Note 2: The proposed additional safety conditions do not imply a systematic need to develop the SW and AEH according to an industry standard or methodology that is recognised as adequate by the competent authority. For instance, if the UA design includes an independent engine shutdown function that systematically prevents the UA from exiting the ground risk buffer due to single failures or an SW/AEH error of the flight controls from occurring, the intent of the conditions of point 6.10.1 above could be considered met |
Please include a reference to the relevant chapter/section of the OM, otherwise indicate ‘n/a’. |
|||||||
|
Self-declaration |
6.11 The UAS has a unique serial number compliant with standard ANSI/CTA2063‑A-2019, Small Unmanned Aerial Systems Serial Numbers, 2019, according to Article 40(4) of Regulation (EU) 2019/945 |
Please describe how this condition is met. |
‘I declare compliance.’ |
|||||
|
6.12 The UAS is equipped with a remote identification system according to Article 40(5) of Regulation (EU) 2019/945. |
Please describe how this condition is met. |
‘I declare compliance.’ |
||||||
|
Self-declaration |
6.13 If the UAS is operated at night, it is equipped with at least one green flashing light according to point UAS.SPEC.050(1)(l)(i) of the UAS Regulation. |
Please describe how this condition is met or indicate ‘n/a’. |
‘I declare compliance.’ or ‘n/a’ |
|||||
Table PDRA-G02.1 — Main limitations and conditions for PDRA-G02
PREDEFINED RISK ASSESSMENT PDRA-S01 Version 1.2
EDITION September 2023
This PDRA addresses the same type of operations that are covered by the standard scenario STS-01 (Appendix 1 to the Annex to the UAS Regulation); however, it provides the UAS operator with the flexibility to use UASs that do not need to be marked as class C5.
This PDRA addresses UAS operations that are conducted:
(1) with UA with maximum characteristic dimensions (e.g. wingspan, rotor diameter/area or maximum distance between the rotors tips in the case of a multirotor) of up to 3 m;
(2) in VLOS of the remote pilot;
(3) over a controlled ground area that might be located in a populated area;
(4) below 150 m above ground level (AGL) (except when close to obstacles); and
(5) in controlled or uncontrolled airspace, provided that there is a low probability of encountering manned aircraft61 Member States are required to establish the appropriate measures (e.g. UAS geographical zones) to ensure this low probability of encounter. Such a low probability of encounter is equivalent to an ARC that is no higher than ARC-b. Thus, ARC-b is to be considered here as the highest residual (final) ARC..
(b) PDRA characterisation and conditions
The characterisation and conditions for this PDRA are summarised in Table PDRA-S01.1 below:
|
Topic |
Assurance level |
Condition |
Demonstration of integrity62 To be filled in by the UAS operator. |
Demonstration of assurance63 To be filled in by the UAS operator. |
||||
|
1. Operational characterisation (scope and limitations) |
||||||||
|
Level of human intervention |
Self-declaration |
1.1 No autonomous operations: the remote pilot should have the ability to maintain control of the UA, except in case of a loss of the command‑and control (C2) link. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||
|
1.2 The remote pilot should operate only one UA at a time. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
1.3 The remote pilot should not operate the UA from a moving vehicle. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
1.4 The remote pilot should not hand the control of the UA over to another command unit. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
UA range limit |
Self-declaration |
1.5 VLOS distance from the remote pilot at all times. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||
|
Overflown areas |
Self-declaration |
1.6 UAS operations should be conducted over a controlled ground area. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||
|
1.7 For the operation of a tethered UA, the area should have a radius equal to the tether length plus 5 m, and should be centred on the point of the surface of the Earth where the tether is fixed. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
1.8 The UA should have a maximum characteristic dimension (e.g. wingspan, rotor diameter/area or maximum distance between rotors’ tips in the case of a multirotor) of less than 3 m. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
Flight height limit |
Self-declaration |
1.9 The remote pilot should maintain the UA within 120 m (unless making use of the option defined in point 1.12) from the closest point of the surface of the Earth. The measurement of the distances should be adapted according to the geographical characteristics of the terrain, such as plains, hills, and mountains. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||
|
1.10 When flying a UA within a horizontal distance of 50 m from an artificial obstacle that is taller than 105 m, the maximum height of the UAS operation may be increased up to 15 m above the height of the obstacle, at the request of the entity responsible for the obstacle. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
1.11 When UAS operators intend to operate at a height above 120 m, up to 150 m, they should define a risk buffer according to point 3.8 below. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
Airspace |
Self-declaration |
1.12 The UA should be operated: |
|
|
||||
|
1.12.1 in uncontrolled airspace, unless different limitations are provided for by the Member States for their UAS geographical zones in areas where the probability of encountering manned aircraft is not low; or |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
1.12.2 in controlled airspace after coordination and flight authorisation in accordance with the published procedures for the area of operation, to ensure that the probability of encountering manned aircraft is low. Note: Airspace with an air risk that is classified as not higher than ARC-b can be considered having a low probability of encountering manned aircraft. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
Visibility |
Self-declaration |
1.13 The flight visibility should allow the remote pilot to conduct the entire flight in VLOS. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||
|
Others |
Self-declaration |
1.14 The UA should not be used to carry dangerous goods, except for dropping items in connection with agricultural, horticultural or forestry activities where the carriage of such items does not contravene any other applicable regulations. Note: The operator shall comply with applicable national or international regulations on the use of plant protection products, chemicals, dangerous substances, and preparations as appropriate. This includes Directive 2009/128/EC establishing a framework for Community action to achieve the sustainable use of pesticides, if applicable. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||
|
2. Operational risk classification (according to the classification defined in AMC1 to Article 11 of the UAS Regulation) |
||||||||
|
Final GRC |
3 |
Final ARC |
ARC-b |
SAIL |
II |
|||
|
3. Operational mitigations |
||||||||
|
Operational and adjacent volume |
Self-declaration |
3.1 The UAS operator should define the operational volume, ground risk buffer and adjacent volume for the intended operation, including: |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||
|
3.1.1 the flight geography; and |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
3.1.2 the contingency volume, with its external limit(s) at least 10 m beyond the limit(s) of the flight geography if the operation is conducted with untethered UA. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
3.2 To determine the operational volume, the UAS operator should consider the position-keeping capabilities of the UAS in 4D space (latitude, longitude, height, and time). |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
3.3 In particular, the accuracy of the navigation solution, the flight technical error of the UAS, as well as the flight path definition error (e.g. map error) and latencies should be considered and addressed when determining the operational volume. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
3.4 The size of adjacent volume should be defined. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
3.5 The remote pilot should apply emergency procedures as soon as there is an indication that the UA may exceed the limits of the operational volume, as per point 5.3.9(d) below. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
3.6 No persons should be overflown when spraying liquids or dropping substances. Infrastructure or facilities can be overflown on request of the entity responsible for the infrastructure or facility. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
Ground risk |
Self-declaration |
3.7 The UAS operator should establish a ground risk buffer to protect third parties on the ground outside the operational volume. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||
|
3.8 For the operation of untethered UA, the ground risk buffer should cover a distance beyond the external limit(s) of the contingency area. That distance should be at least as defined below: |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
3.9 For the operation of tethered UA, the ground risk buffer is considered in point 1.7 above. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
Air risk |
Declaration supported by |
3.10 If the UAS operation is performed above 120 m and up to 150 m, the UAS operator should: |
|
|
||||
|
3.10.1 establish an air risk buffer to protect third parties in the air outside the operational volume; and |
Please include a reference to the relevant chapter/section of the OM, otherwise indicate ‘n/a’. |
‘I declare compliance and that supporting evidence is included in the OM.’ Justification supporting the reduction of the air risk buffer is documented in […] or ‘n/a’. |
||||||
|
3.10.2 if the air risk buffer is part of controlled airspace, coordinate the operation with the respective ANSP; |
Please include a reference to the relevant chapter/section of the OM, otherwise indicate ‘n/a’. |
‘I declare compliance and that supporting evidence is included in the OM.’ ‘or n/a’ |
||||||
|
3.10.3 develop appropriate procedures to not jeopardise other airspace users. |
Please include a reference to the relevant chapter/section of the OM. Please describe how the remote pilots and, if employed, the AOs are able to assess the height of the UA compared to other airspace users65 The UAS operator should demonstrate that they have sufficient confidence in the accuracy of the information about the height of the UA and the means to advert and avoid other airspace users and obstacles in the vicinity of the UA., otherwise indicate ‘n/a’. |
‘I declare compliance and that supporting evidence is included in the OM.’ ‘or n/a’ |
||||||
|
Self-declaration |
3.11 The operational volume should be outside any geographical zone corresponding to a flight restriction zone of a protected aerodrome or of any other type, as defined by the responsible authority, unless the UAS operator has been granted appropriate permission. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
3.12 Prior to the flight, the UAS operator should assess the proximity of the planned operation to manned aircraft activity. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
3.13 The UAS operator should establish a de-confliction scheme that allows the remote pilot to take efficient decisions in case of incoming traffic. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
Observers |
|
3.14 Airspace observers (AOs): n/a UA observers: refer to point 5.3.9(b) below. |
|
|
||||
|
4. UAS operator and UAS operations conditions |
||||||||
|
UAS operator and UAS operations |
Declaration supported by |
4.1 The UAS operator should: |
|
|
||||
|
4.1.1 develop an operations manual (OM) (for the template, refer to AMC1 UAS.SPEC.030(3)(e) and to the complementary information in GM1 UAS.SPEC.030(3)(e)); |
Please describe how this condition is met. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
||||||
|
4.1.2 define, and include in the OM, the procedure to determine the operational volume and ground risk buffer for the intended operation, as per points 3.1 to 3.6 above, and the adjacent volume; |
Please describe how this condition is met. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
||||||
|
4.1.3 develop procedures to ensure that that the operation is conducted safely and the security requirements applicable to the area of operations are complied with during the intended operation; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
||||||
|
4.1.4 develop measures to protect the UAS against unlawful interference and unauthorised access; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
||||||
|
4.1.5 develop procedures to ensure that all operations comply with Regulation (EU) 2016/679 on the protection of natural persons with regard to the processing of personal data and on the free movement of such data. In particular, the UAS operator should carry out a data protection impact assessment, when this is required by the data protection national authority of the Member State with regard to the application of Article 35 of that Regulation; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
||||||
|
4.1.6 develop guidelines for its remote pilots to plan UAS operations in a manner that minimises nuisance, including noise and other emissions‑related nuisance, to people and animals; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
||||||
|
4.1.7 ensure the adequacy of the contingency and emergency procedures and prove it through any of the following: (a) dedicated flight tests; or (b) simulations, provided that the representativeness of the simulation means is proven valid for the intended purpose with positive results; or (c) any other means acceptable to the competent authority; |
Please describe how this condition is met |
‘I declare compliance and that evidence is available to the competent authority for review.’ |
||||||
|
4.1.8 develop an effective emergency response plan (ERP) that is suitable for the intended operation (see GM1 UAS.SPEC.030(3)(e)); |
Please describe how this condition is met |
‘I declare compliance and that evidence is available to the competent authority for review.’ |
||||||
|
4.1.9 upload updated information into the geo-awareness function, if such system is installed on the UAS, when required by the UAS geographical zone for the intended location of the operation; |
Please describe how this condition is met |
‘I declare compliance and that supporting evidence is included in the OM.’ |
||||||
|
4.1.10 ensure that before starting the operation, the controlled ground area is in place, effective, and compliant with the minimum distance that is defined in points 3.1 and 3.5 above and, when required, coordination with the appropriate authorities has been established; |
Please describe how this condition is met |
‘I declare compliance and that supporting evidence is included in the OM.’ |
||||||
|
4.1.11 ensure that before starting the operation, all persons that are present in the controlled ground area: |
|
|
||||||
|
(a) have been informed of the risks of the operation; |
Please describe how this condition is met |
‘I declare compliance and that supporting evidence is included in the OM.’ |
||||||
|
(b) have been briefed on or trained in, as appropriate, the safety precautions and measures that the UAS operator has established for their protection; and |
Please describe how this condition is met |
‘I declare compliance and that supporting evidence is included in the OM.’ |
||||||
|
(c) have explicitly agreed to participate in the operation; and |
Please describe how this condition is met |
‘I declare compliance and that supporting evidence is included in the OM.’ |
||||||
|
4.1.12 designate for each flight a remote pilot with adequate competency and other personnel in charge of duties essential to the UAS operation if needed; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
||||||
|
4.1.13 in case the operation takes place in a controlled airspace, as part of the procedures that are contained in the OM (point 4.1.1 above), include the description of the following: (a) the method and means of communication with the authority or entity responsible for the management of the airspace during the entire period of operation; (b) the member(s) of personnel in charge of duties essential to the UA operation, who are responsible for establishing that communication; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
||||||
|
4.1.14 ensure that the UAS operation effectively uses and supports the efficient use of the radio spectrum in order to avoid harmful interference; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
||||||
|
4.1.15 keep for a minimum of 3 years and maintain up to date a record of the information on UAS operations, including any unusual technical or operational occurrences and other data as required by the declaration or by the operational authorisation. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance and that recordkeeping data is available to the competent authority.’ |
||||||
|
UAS maintenance |
Self-declaration |
4.2 The UAS operator should: |
|
|
||||
|
4.2.1 ensure that the UAS maintenance instructions that are defined by the UAS operator are included in the OM and cover at least the UAS manufacturer’s instructions and requirements when applicable; and |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
4.2.2 ensure that the maintenance staff follow the UAS maintenance instructions when performing maintenance; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
4.2.3 keep for a minimum of 3 years and maintain up to date a record of the maintenance activities conducted on the UAS; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
4.2.4 establish and maintain up to date a list of the maintenance staff employed by the operator to carry out maintenance activities; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
4.2.5 comply with point UAS.SPEC.100, if the UAS uses certified equipment. |
Please include a reference to the relevant chapter/section of the OM or n/a. |
‘I declare compliance.’ or ‘n/a’ |
||||||
|
External services |
Self-declaration |
4.3 The UAS operator should ensure that the level of performance for any externally provided service that is necessary for the safety of the flight is adequate for the intended operation. The UAS operator should declare that this level of performance is adequately achieved. |
Please describe how this condition is met. |
‘I declare compliance.’ |
||||
|
4.4 The UAS operator should define and allocate the roles and responsibilities between the UAS operator and the external service provider(s), if applicable. |
|
|
||||||
|
5. Conditions for the personnel in charge of duties essential to the UAS operation |
||||||||
|
General |
|
5.1 The UAS operator should keep and maintain up to date a record of all the relevant qualifications and training courses completed by the remote pilot and the other personnel in charge of duties essential to the UAS operation and by the maintenance staff for at least 3 years after those persons have ceased to be employed by the organisation or have changed position within the organisation. |
Please describe how this condition is met. |
‘I declare compliance.’ Record-keeping data is available for inspection at the request of the competent authority. |
||||
|
5.2 The remote pilot should have the authority to cancel or delay any or all flight operations under the following conditions: |
|
|
||||||
|
5.2.1 the safety of persons is jeopardised; or |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
5.2.2 property on the ground is jeopardised; or |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
5.2.3 other airspace users are in jeopardy; or |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
5.2.4 there is a violation of the terms of the operational authorisation. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
Remote pilot |
Self-declaration |
5.3 The remote pilot should: |
|
|
||||
|
5.3.1 not perform any duties under the influence of psychoactive substances or alcohol, or when they are unfit to perform their tasks due to injury, fatigue, medication, sickness or other causes; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
5.3.2 be familiar with the manufacturer’s instructions provided by the manufacturer of the UAS; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
5.3.3 ensure that the UA remains clear of clouds; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
5.3.4 hold a certificate of remote pilot theoretical knowledge, in accordance with Attachment A to Chapter I of Appendix 1 to the Annex to the UAS Regulation, which is issued by the competent authority or by an entity that is designated by the competent authority of a Member State; |
Please describe how this condition is met. |
‘I declare compliance.’ or ‘n/a’ |
||||||
|
5.3.5 hold an accreditation of completion of a practical-skills training course for this PDRA, in accordance with Attachment A to Chapter I of Appendix 1 to the Annex to the UAS Regulation, which is issued by: (a) an entity that has declared compliance with the requirements of Appendix 3 to the Annex to the UAS Regulation and is recognised by the competent authority of a Member State; or (b) a UAS operator that has been authorised by the competent authority of the Member State of registration to operate according to this PDRA (or declared to the same competent authority, compliance with STS‑01) and with the requirements of Appendix 3 to the Annex to the UAS Regulation. |
Please describe how this condition is met. |
‘I declare compliance.’ or ‘n/a’ |
||||||
|
5.3.6 If operations are conducted at a height between 120 and 150 m, the remote pilot should undergo additional theoretical knowledge training in the following topics: |
|
|
||||||
|
(a) raising awareness about the air risk and about the existence of other airspace users; |
Please describe how this condition is met. |
‘I declare compliance and that the training syllabus is available for inspection at the request of the competent authority.’ |
||||||
|
(b) checking height determination/ limitation devices; and |
Please describe how this condition is met. |
‘I declare compliance and that the training syllabus is available for inspection at the request of the competent authority.’ |
||||||
|
(c) using applicable procedures in case a manned aircraft is detected. |
Please describe how this condition is met. |
‘I declare compliance and that the training syllabus is available for inspection at the request of the competent authority.’ |
||||||
|
5.3.7 As an alternative to holding a certificate of remote pilot theoretical knowledge, according to point 5.3.4, and to holding an accreditation of completion of a practical-skills training course according to point 5.3.5, the operator may propose a dedicated training syllabus to the competent authority; |
Please describe how this condition is met. |
‘I declare compliance and that the training syllabus is available for inspection at the request of the competent authority.’ or ‘n/a’. |
||||||
|
5.3.8 Before starting the UAS operation, the remote pilot should: |
|
|
||||||
|
(a) verify that the means to terminate the UA flight and the remote identification system are operational; |
Please describe how this condition is met. |
‘I declare compliance. |
||||||
|
(b) obtain updated information relevant to the intended operation about any geographical zones defined in accordance with Article 15 of the UAS Regulation; and |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance. |
||||||
|
(c) ensure that the UAS is in a safe condition to complete the intended flight safely and, if applicable, check whether the direct remote identification is active and up to date. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance. |
||||||
|
5.3.9 During the flight: |
|
|
||||||
|
(a) keep the UA in VLOS and maintain thorough visual scan of the airspace that surrounds the UA to avoid any risk of collision with manned aircraft; the remote pilot should discontinue the flight if the operation poses a risk to other aircraft, people, animals, environment or property; |
Please describe how this condition is met. |
‘I declare compliance.’ |
||||||
|
(b) for the purpose of point (a) above, possibly being assisted by a UA observer66 Please refer to point UAS.STS-02.050 for the responsibilities of the UA observer.; clear and effective communication should be established between the remote pilot and the UA observer; |
Please describe how this condition is met. |
‘I declare compliance.’ |
||||||
|
(c) use the contingency procedures that are defined by the UAS operator for abnormal situations, including situations where the remote pilot has an indication that the UA may exceed the limits of the flight geography; and |
Please describe how this condition is met. |
‘I declare compliance.’ |
||||||
|
(d) use the emergency procedures that are defined by the UAS operator for emergencies, including triggering the means to terminate the flight when the remote pilot has an indication that the UA may exceed the limits of the operational volume; the means to terminate the flight should be triggered at least 10 m before the UA reaches the limits of the operational volume; |
Please describe how this condition is met. |
‘I declare compliance.’ |
||||||
|
(e) keep the UA at a ground speed of less than 5 m/s in case of untethered UA; |
Please describe how this condition is met. |
‘I declare compliance.’ |
||||||
|
(f) activate the direct remote identification system67 Applicable from 1 July 2022.. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
6. Technical conditions |
||||||||
|
UAS |
Self-declaration68 The containment requirements (reference to point 5 of Part 16 of Regulation (EU) 2019/945) should be demonstrated with a medium assurance level. |
6.1 The UAS operator should use a UAS marked as class C5 and complies with the requirements of that class, as defined in Part 16 of the Annex to Regulation (EU) 2019/945. |
|
‘I declare that the UAS is marked with a class C5 identification label.’ or ‘n/a’ |
||||
|
6.2 As an alternative to point 6.1, the UAS operator may use a UAS that complies with the requirements of Part 16 of the Annex to Regulation (EU) 2019/945, except that the UAS does not need to:
Note 1: The UAS can comply with point (9) of Part 4 of the Annex to Regulation (EU) 2019/945 by using an add-on that complies with Part 6 of the Annex to that Regulation.
Note 2: If the UA does not bear a physical serial number that is compliant with standard ANSI/CTA 2063-A ‘Small Unmanned Aerial Systems Serial Numbers’ and/or does not have an integrated system of direct remote identification, it can comply with point (9) of Part 4 of the Annex to Regulation (EU) 2019/945 by using an add-on that complies with Part 6 of the Annex to that Regulation. |
Please describe how this condition is met. |
‘I declare compliance.’ or ‘n/a’ |
||||||
|
6.3 In addition, if: • the adjacent area does not include a populated area or an assembly of people; and • the adjacent airspace is classified as ARC-a or ARC-b, point 5 of Part 16 of the Annex to Regulation (EU) 2019/945 may be replaced with the following basic containment conditions: • no probable failure of the UAS or of any external system that supports the operation would lead to operation outside the operational volume; and • it is reasonably expected that a fatality will not occur due to any probable failure of the UAS or of any external system that supports the operation. |
Please describe how this condition is met. |
‘Basic containment applies and I declare that a design and installation appraisal is available and it covers at least: — the design and installation features (independence separation, and redundancy); and — the particular risks (e.g. hail, ice, snow, electromagnetic interference, etc.) relevant to the type of operation.’ or ‘Enhanced containment applies and I declare compliance with MoC Light-UAS.2511. Analysis and/or test data with supporting evidence is available.’ or ‘The UAS has a DVR demonstrating compliance with the enhanced containment requirements.’ |
||||||
|
6.4 If designed to spray, the UA should: |
|
|
||||||
|
6.4.1 be designed to avoid an accidental release of any substance; |
|
|
||||||
|
|
|
6.4.2 have means for the remote pilot to immediately stop the spraying of liquids or dropping of substances in case of an emergency. |
|
|
||||
Table PDRA-S01.1 — Main limitations and conditions for PDRA-S01
PREDEFINED RISK ASSESSMENT PDRA-S02 Version 1.1
EDITION January 2022
This PDRA addresses the same type of operations that are covered by the standard scenario STS-02 (Appendix 1 to the Annex to the UAS Regulation); however, it provides the UAS operator with the flexibility to use UASs that do not need to be marked as class C6.
This PDRA addresses UAS operations that are conducted:
(1) with UA with maximum characteristic dimensions (e.g. wingspan, rotor diameter/area or maximum distance between rotors in case of a multirotor) of up to 3 m and MTOM of up to 25 kg;
(2) at a distance of up to 2 km from the remote pilot if airspace observers (AOs) are employed; otherwise at a distance of up to 1 km;
(3) over a controlled ground area that is entirely located in a sparsely populated area;
(4) below 150 m above ground level (AGL) (except when close to obstacles); and
(5) in controlled or uncontrolled airspace, provided that there is a low probability of encountering manned aircraft69 Member States are required to establish the appropriate measures (e.g. UAS geographical zones) to ensure this low probability of encounter. Such low probability of encounter is equivalent to an ARC that is no higher than ARC-b. Thus, ARC-b is to be considered here as the highest residual (final) ARC..
(b) PDRA characterisation and conditions
The characterisation and conditions for this PDRA are summarised in Table PDRA-S02.1 below:
|
Topic |
Method of proof |
Condition |
|||||||
|
1. Operational characterisation (scope and limitations) |
|||||||||
|
Level of human intervention |
Self-declaration |
1.1 No autonomous operations: the remote pilot should maintain control of the UA, except in case of a loss of the command‑and‑control (C2) link. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
1.2 The remote pilot should operate only one UA at a time. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
1.3 The remote pilot should not operate the UA from a moving vehicle. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
1.4 The remote pilot should not hand the control of the UA over to another command unit. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
UA range limit |
Self-declaration |
1.5 UAS operations should be conducted: |
|
|
|||||
|
1.5.1 keeping the UA in sight of the remote pilot during the launch and recovery of the UA, unless the recovery of the UA is the result of an emergency flight termination; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
1.5.2 if no airspace observer (AO) is employed in the operation, with the UA no further than 1 km from the remote pilot; and |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
1.5.3 if one or more AOs are employed in the operation, with the UA no further than 2 km from the remote pilot. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
Overflown areas |
Self-declaration |
1.6 UAS operations should be conducted over a controlled ground area. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
UA limitations |
Self-declaration |
1.7 The UA should have an MTOM of less than 25 kg, including payload. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
1.8 The UA should have maximum characteristic dimensions (e.g. wingspan, rotor diameter/area or maximum distance between rotors in case of a multirotor) of less than 3 m. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
1.9 The UA should have a maximum ground speed in level flight of not more than 50 m/s. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
Flight height limit |
Self-declaration |
1.10 The remote pilot should maintain the UA within 120 m (unless making use of the option defined in point 1.12) from the closest point of the surface of the Earth. The measurement of the distances should be adapted according to the geographical characteristics of the terrain, such as plains, hills, and mountains. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
1.11 When flying a UA within a horizontal distance of 50 m from an artificial obstacle that is taller than 105 m, the maximum height of the UAS operation may be increased up to 15 m above the height of the obstacle at the request of the entity that is responsible for the obstacle. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
1.12 The UAS operator may propose to operate at a height above 120 m, but up to 150 m. In that case, the UAS operator should define a risk buffer according to point 3.7 below. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
Airspace |
|
1.13 The UA should be operated: |
|
|
|||||
|
1.13.1 in uncontrolled airspace, unless different limitations are provided for by the Member States for their UAS geographical zones in areas where the probability of encountering manned aircraft is not low; or |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
1.13.2 in controlled airspace after coordination and flight authorisation in accordance with the published procedures for the area of operation, to ensure that the probability of encountering manned aircraft is low. Note: Airspace with an air risk that is classified as not higher than ARC-b can be considered having a low probability of encountering manned aircraft. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
Visibility |
Self-declaration |
1.14 The UA operation should be conducted in an area where the flight visibility is greater than 5 km. Note: Please refer to GM1 UAS.STS-02.020(3). |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
Others |
Low |
1.15 The UA should not be used to carry dangerous goods, except for dropping items in connection with agricultural, horticultural or forestry activities where the carriage of such items does not contravene any other applicable regulations. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
2. Operational risk classification (according to the classification defined in AMC1 to Article 11 of the UAS Regulation) |
|||||||||
|
Final GRC |
3 |
Final ARC |
ARC-b |
SAIL |
II |
||||
|
3. Operational mitigations |
|||||||||
|
Operational volume |
Self-declaration |
3.1 The UAS operator should define the operational volume for the intended operation, including the flight geography and the contingency volume. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
3.2 To determine the operational volume, the UAS operator should consider the position-keeping capabilities of the UAS in 4D space (latitude, longitude, height, and time). |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
3.3 In particular, the accuracy of the navigation solution, the flight technical error of the UAS, as well as the flight path definition error (e.g. map error) and latencies should be considered and addressed when determining the operational volume. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
3.4 The remote pilot should apply emergency procedures as soon as there is an indication that the UA may exceed the limits of the operational volume, as per point 5.3.10(h) below. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
Ground risk |
Self-declaration |
3.5 The UAS operator should establish a ground risk buffer to protect third parties on the ground outside the operational volume. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’
|
|||||
|
3.6 The ground risk buffer should cover a distance that is at least equal to the distance most likely to be travelled by the UA after activation of the flight termination system specified by the UAS manufacturer’s instructions, considering the operational conditions within the limitations specified by the UAS manufacturer. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’
|
|||||||
|
Air risk |
Declaration supported by |
3.7 If the UAS operation is performed above 120 m and up to 150 m, the UAS operator should: |
|
|
|||||
|
3.7.1 establish an air risk buffer to protect third parties in the air outside the operational volume; and |
Please include a reference to the relevant chapter/section of the OM, or otherwise indicate ‘n/a’. |
‘I declare compliance.’
Justification supporting the reduction of the air risk buffer is documented in […]. or ‘n/a’ |
|||||||
|
3.7.2 if the air risk buffer is part of controlled airspace, coordinate the operations with the respective ANSP. |
Please include a reference to the relevant chapter/section of the OM, or otherwise indicate ‘n/a’. |
‘I declare compliance and that supporting evidence is included in the OM.’ […]. or ‘n/a’ |
|||||||
|
3.7.3 develop appropriate procedures to not jeopardise other airspace users. |
Please include a reference to the relevant chapter/section of the OM.
Please describe how the remote pilots and, if employed, the AOs are able to assess the height of the UA compared to other airspace users72 The UAS operator should demonstrate that they have sufficient confidence in the accuracy of the information about the height of the UA and the means to advert and avoid other airspace users and obstacles in the vicinity of the UA., or otherwise indicate ‘n/a’. |
‘I declare compliance and that supporting evidence is included in the OM.’ […]. or ‘n/a’ |
|||||||
|
Self-declaration |
3.8 The operational volume should be outside any geographical zone corresponding to a flight restriction zone of a protected aerodrome or of any other type, as defined by the responsible authority, unless the UAS operator has been granted appropriate permission. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance. |
||||||
|
3.9 Prior to the flight, the UAS operator should assess the proximity of the planned operation to manned aircraft activity. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance. |
|||||||
|
Observers73 Please refer to point UAS.STS-02.050 for the AO’s main responsibilities. |
Self-declaration |
3.10 If the UAS operator decides to employ one or more airspace observers (AOs), the UA may be operated at a distance from the remote pilot greater than that referred to in point 1.5.2 above. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance. |
|||||
|
3.11 In relation to AOs, the UAS operator should comply with the conditions of point 4.1.15 below. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance. |
|||||||
|
3.12. AOs should comply with the conditions of point 5.4 below. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance. |
|||||||
|
UAS operator and UAS operations |
Declaration supported by |
4.1 The UAS operator should: |
|
|
|||||
|
4.1.1 develop an operations manual (OM) (for the template, refer to AMC1 UAS.SPEC.030(3)(e) and to the complementary information in GM1 UAS.SPEC.030(3)(e)); |
Please describe how this condition is met. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
|||||||
|
4.1.2 define the operational volume and ground risk buffer for the intended operation, as per points 3.1 to 3.6 above, and include them in the OM; |
Please describe how this condition is met. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
|||||||
|
4.1.3 develop procedures to ensure that the security requirements applicable to the area of operations are complied with during the intended operation; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
|||||||
|
4.1.4 develop measures to protect the UAS against unlawful interference and unauthorised access; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
|||||||
|
4.1.5 develop procedures to ensure that all operations comply with Regulation (EU) 2016/679 on the protection of natural persons with regard to the processing of personal data and on the free movement of such data. In particular, the UAS operator should carry out a data protection impact assessment, when this is required by the data protection national authority of the Member State with regard to the application of Article 35 of that Regulation; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
|||||||
|
4.1.6 develop guidelines for its remote pilots to plan UAS operations in a manner that minimises nuisance, including noise and other emissions‑related nuisance, to people and animals; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
|||||||
|
4.1.7 ensure the adequacy of the contingency and emergency procedures and prove it through any of the following: (a) dedicated flight tests; or (b) simulations, provided that the representativeness of the simulation means is proven for the intended purpose with positive results; or (c) any other means acceptable to the competent authority; |
Please describe how this condition is met. |
‘I declare compliance and evidence is available to the competent authority for review.’ |
|||||||
|
4.1.8 develop an emergency response plan (ERP) that is suitable for the intended operation in accordance with the conditions for a ‘medium’ level of robustness (please refer to AMC3 UAS.SPEC.030(3)(e); |
Please describe how this condition is met |
‘I declare compliance and that the ERP is available to the competent authority for review.’ |
|||||||
|
4.1.9 upload updated information into the geo‑awareness function, if such system is installed on the UAS, when required by the UAS geographical zone for the intended location of the operation; |
Please describe how this condition is met |
‘I declare compliance and that supporting evidence is included in the OM.’ |
|||||||
|
4.1.10 ensure that before starting the operation, the controlled ground area is in place, effective, and compliant with the minimum distance that is defined in points 3.1 and 3.6 above and, when required, coordinate with the appropriate authorities; |
Please describe how this condition is met |
‘I declare compliance and that supporting evidence is included in the OM.’ |
|||||||
|
4.1.11 ensure that before starting the operation, all persons that are present in the controlled ground area: |
|
|
|||||||
|
(a) have been informed of the risks of the operation; |
Please describe how this condition is met. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
|||||||
|
(b) have been briefed on or trained in, as appropriate, the safety precautions and measures that the UAS operator has established for their protection; and |
Please describe how this condition is met. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
|||||||
|
(c) have explicitly agreed to participate in the operation; |
Please describe how this condition is met. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
|||||||
|
4.1.12 designate for each flight a remote pilot with adequate competency and other personnel in charge of duties essential to the UAS operation if needed; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
|||||||
|
4.1.13 ensure that the UAS operation effectively uses and supports the efficient use of the radio spectrum in order to avoid harmful interference; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
|||||||
|
4.1.14 keep for a minimum of 3 years and maintain up to date a record of the information on UAS operations, including any unusual technical or operational occurrences and other data as required by the declaration or by the operational authorisation; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance and that record‑keeping data is available to the competent authority.’ |
|||||||
|
4.1.15 before starting the operation, and if airspace observers (AOs) are employed: |
|
|
|||||||
|
(a) ensure the correct placement and the appropriate number of AOs along the intended flight path; |
Please describe how this condition is met |
‘I declare compliance and that supporting evidence is included in the OM.’ |
|||||||
|
(b) verify that: |
|
|
|||||||
|
(i) the visibility and the planned distance of the AOs are within the acceptable limits as defined in the OM; |
Please describe how this condition is met |
‘I declare compliance and that supporting evidence is included in the OM.’ |
|||||||
|
(ii) there are no potential terrain obstructions for each AO; |
Please describe how this condition is met |
‘I declare compliance and that supporting evidence is included in the OM.’ |
|||||||
|
(iii) there are no gaps between the zones that are covered by each of the AOs; |
Please describe how this condition is met |
‘I declare compliance and that supporting evidence is included in the OM.’ |
|||||||
|
(iv) the communication with each AO is established and effective; |
Please describe how this condition is met |
‘I declare compliance and that supporting evidence is included in the OM.’ |
|||||||
|
(v) if means are used by the AOs to determine the position of the UA, those means are functioning and effective; and |
Please describe how this condition is met |
‘I declare compliance and that supporting evidence is included in the OM.’ |
|||||||
|
(c) ensure that the AOs have been briefed on the planned flight path of the UA and on the associated timing. |
Please describe how this condition is met |
‘I declare compliance and that supporting evidence is included in the OM.’ |
|||||||
|
4.2 If no AO is employed in the operation, the operation should be conducted with the UA flying no further from the remote pilot than the distance that is indicated in point 1.5.2 above and following a preprogrammed trajectory when the UA is not in the VLOS of the remote pilot |
Please describe how this condition is met. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
|||||||
|
4.3 If one or more AOs are employed in the operation, the following conditions should be complied with: |
|
|
|||||||
|
4.3.1 the AO(s) should be positioned so as to adequately cover the operational volume and the surrounding airspace, having the minimum flight visibility that is indicated in point 1.14 above; |
Please describe how this condition is met. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
|||||||
|
4.3.2 the UA should be operated no further than 1 km from the AO who is nearest to the UA; |
Please describe how this condition is met. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
|||||||
|
4.3.3 the distance between any AO and the remote pilot should not be greater than 1 km; and |
Please describe how this condition is met. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
|||||||
|
4.3.4 robust and effective means are available for communication between the remote pilot and the AO(s). |
Please describe how this condition is met. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
|||||||
|
UAS maintenance |
Self-declaration |
4.4. The UAS operator should: |
|
|
|||||
|
4.4.1 ensure that the UAS maintenance instructions that are defined by the UAS operator are included in the OM and cover at least the UAS manufacturer’s instructions and requirements when applicable; and |
Please describe how this condition is met. |
‘I declare compliance.’ |
|||||||
|
4.4.2 that maintenance staff follow the UAS maintenance instructions when performing maintenance; |
Please describe how this condition is met. |
‘I declare compliance.’ |
|||||||
|
4.4.3 keep for a minimum of 3 years and maintain up to date a record of the maintenance activities conducted on the UAS; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
4.4.4 establish and maintain up to date a list of the maintenance staff employed by the operator to carry out maintenance activities; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
4.4.5 comply with point UAS.SPEC.100, if the UAS uses certified equipment. |
Please include a reference to the relevant chapter/section of the OM or indicate ‘n/a’ |
‘I declare compliance.’ or ‘n/a’ |
|||||||
|
External services |
Self-declaration |
4.5 The UAS operator should ensure that the level of performance for any externally provided service that is necessary for the safety of the flight is adequate for the intended operation. The UAS operator should declare that this level of performance is adequately achieved. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
4.6 The UAS operator should define and allocate the roles and responsibilities between the UAS operator and the external service provider(s), if applicable. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
5. Conditions for the personnel in charge of duties essential to the UAS operation |
|||||||||
|
General |
|
5.1 The UAS operator should keep and maintain up to date a record of all the relevant qualifications and training courses completed by the remote pilot and other personnel in charge of duties essential to the UAS operation and by the maintenance staff for at least 3 years after those persons have ceased to be employed by the organisation or have changed position within the organisation. |
Please describe how this condition is met |
‘I declare compliance.’ Record‑keeping data is available for inspection at the request of the competent authority. |
|||||
|
5.2 The remote pilot should have the authority to cancel or delay any or all flight operations under the following conditions: |
|
|
|||||||
|
5.2.1 the safety of persons is jeopardised; or |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
5.2.2 property on the ground is jeopardised; or |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
5.2.3 other airspace users are in jeopardy; or |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
5.2.4 there is a violation of the terms of the operational authorisation. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
Remote pilot |
Self-declaration |
5.3 The remote pilot should: |
|
|
|||||
|
5.3.1 not perform any duties under the influence of psychoactive substances or alcohol, or when they are unfit to perform their tasks due to injury, fatigue, medication, sickness or other causes; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
5.3.2 be familiar with the manufacturer’s instructions provided by the manufacturer of the UAS; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
5.3.3 ensure that the UA remains clear of clouds; and |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
5.3.4 hold a certificate of remote pilot theoretical knowledge, in accordance with Attachment A to Chapter II of Appendix 1 to the Annex to the UAS Regulation, which is issued by the competent authority or by an entity that is designated by the competent authority of a Member State; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
5.3.5 hold an accreditation of completion of a practical-skills training course for this PDRA, in accordance with Attachment A to Chapter I of Appendix 1 to the Annex to the UAS Regulation, which is issued by: (a) an entity that has declared compliance with the requirements of Appendix 3 to the Annex to the UAS Regulation and is recognised by the competent authority of a Member State; or (b) a UAS operator that has been authorised by the competent authority of the Member State of registration to operate according to this PDRA (or declared to the same competent authority compliance with STS-01) and with the requirements of Appendix 3 to the Annex to the UAS Regulation; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
5.3.6 if operations are conducted at a height between 120 and 150 m, receive additional theoretical knowledge training in the following topics: |
|
|
|||||||
|
(a) raising awareness about the air risk and about the existence of other airspace users; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
(b) checking height determination/ limitation devices; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
(c) using procedures for the coordination between the remote pilot and the AO(s); |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
(d) using the applicable procedures in case a manned aircraft is detected; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
5.3.7 obtain updated information relevant to the intended operation about any geographical zones defined in accordance with Article 15 of the UAS Regulation; and |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
5.3.8 ensure that the UAS is in a safe condition to complete the intended flight safely and, if applicable, check whether the direct remote identification is active and up to date; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
5.3.9 before starting the UAS operation: |
|
|
|||||||
|
(a) verify that the remote identification system is operational; |
Please describe how this condition is met |
‘I declare compliance.’ |
|||||||
|
(b) obtain updated information relevant to the intended operation about any geographical zones defined in accordance with Article 15 of the UAS Regulation; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
(c) ensure that the UAS is in a safe condition to complete the intended flight safely and, if applicable, check whether the direct remote identification is active and up to date; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
(d) set the programmable flight volume of the UA to keep it within the flight geography; and |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
(e) verify that the means to terminate the flight as well as the programmable flight volume functionality of the UA are operational; and |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
5.3.10 during the flight: |
|
|
|||||||
|
(a) unless supported by aerial observers (AOs), maintain thorough visual scan of the airspace that surrounds the UA to avoid any risk of collision with manned aircraft; the remote pilot should discontinue the flight if the operation poses a risk to other aircraft, people, animals, environment or property; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
(b) maintain control of the UA, except in case of a loss of the command‑and‑control link; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
(c) operate only one UA at a time; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
(d) not operate the UA from a moving vehicle; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
(e) not hand the control of the UA over to another control unit; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
(f) inform the AO(s), when employed, in a timely manner of any deviations of the UA from the intended flight path, and of the associated timing; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
(g) use the contingency procedures that are defined by the UAS operator for abnormal situations, including situations where the remote pilot has an indication that the UA may exceed the limits of the flight geography; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
(h) use the emergency procedures that are defined by the UAS operator for emergencies, including triggering the means to terminate the flight when the remote pilot has an indication that the UA may exceed the limits of the operational volume; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
(i) activate the system to prevent the UA from exceeding the limits of the flight geography; and |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
(j) activate the direct remote identification system74 Applicable from 1 July 2022.. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||||
|
Airspace observer (AO) |
Self-declaration |
5.4 The AO’s main responsibilities are laid down in point UAS.STS-02.050 of the Annex to the UAS Regulation. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
|||||
|
5.5 If operations are conducted at a height between 120 and 150 m, the AO(s) should undergo additional theoretical knowledge training in the following topics: |
|
|
|||||||
|
(a) raising awareness about the air risk and about the existence of other airspace users; |
Please include a reference to the relevant chapter/section of the OM, or otherwise indicate ‘n/a’. |
‘I declare compliance.’ or ‘n/a’ |
|||||||
|
(b) checking height determination/ limitation devices; |
Please include a reference to the relevant chapter/section of the OM, or otherwise indicate ‘n/a’. |
‘I declare compliance.’ or ‘n/a’ |
|||||||
|
(c) using the procedures for the coordination between the remote pilot and the AO(s); and |
Please include a reference to the relevant chapter/section of the OM, or otherwise indicate ‘n/a’. |
‘I declare compliance.’ or ‘n/a’ |
|||||||
|
(d) using the applicable procedures in case a manned aircraft is detected. |
Please include a reference to the relevant chapter/section of the OM, or otherwise indicate ‘n/a’. |
‘I declare compliance.’ or ‘n/a’ |
|||||||
|
6. Technical conditions |
|||||||||
|
UAS |
Self-declaration75 The containment requirements (reference to points 4 and 5 of Part 17 of Regulation (EU) 2019/945) should be demonstrated with a ‘medium’ assurance level. |
6.1 The UAS operator should use a UAS marked with a class C6 identification label and which complies with the requirements of that class, as defined in Part 17 of the Annex to Regulation (EU) 2019/945. |
|
‘I declare that the UAS is marked with a class C6 identification label.’ or ‘n/a’ |
|||||
|
6.2 As an alternative to point 6.1, the UAS operator may use a UAS that complies with the requirements of Part 16 of the Annex to Regulation (EU) 2019/945, except that the UAS does not need to: |
Please describe how this condition is met. |
‘I declare compliance.’ or ‘n/a’ |
|||||||
|
6.2.1 bear a class C3 or a class C6 UAS identification label; |
|
|
|||||||
|
6.2.2 be exclusively powered by electricity, if the UAS operator ensures that the environmental impact that is caused by the use of non-electric UAS is minimised; |
|
|
|||||||
|
6.2.3 include a notice that is published by EASA and provides the applicable limitations and obligations, as required by the UAS Regulation; and |
|
|
|||||||
|
6.2.4 include the manufacturer’s instructions for the UAS if it is privately built; however, information on its operation and maintenance, as well as on the training of the remote pilot, should be included in the OM.
Note 1: The UAS can comply with point (9) of Part 4 of the Annex to Regulation (EU) 2019/945 by using an add-on that complies with Part 6 of the Annex to that Regulation.
Note 2: If the UA does not bear a physical serial number that is compliant with standard ANSI/CTA-2063-A ‘Small Unmanned Aerial Systems Serial Numbers’ and/or does not have an integrated system of direct remote identification, it can comply with point (9) of Part 4 of the Annex to Regulation by using an add-on that complies with Part 6 of the Annex to that Regulation.
Note 3: If the UAS is privately built, there may be no identification on the UA of its MTOM. In that case, the operator should ensure that the MTOM of the UA, in the configuration of the UA before take-off, does not exceed 25 kg. |
|
|
|||||||
Table PDRA-S02.1 — Main limitations and conditions for PDRA-S02
AMC6 Article 11 Rules for conducting an operational risk assessment
ED Decision 2023/012/R
PREDEFINED RISK ASSESSMENT PDRA-G03 Version 1.1
EDITION September 2023
This PDRA is the result of applying the methodology described in AMC1 Article 11 of the UAS Regulation to UAS operations performed in the ‘specific’ category:
(1) with UA with maximum characteristic dimensions (e.g. wingspan, rotor diameter/area or maximum distance between rotors in case of a multirotor) of up to 3 m and typical kinetic energies of up to 34 kJ;
(2) BVLOS of the remote pilot;
(3) over sparsely populated areas;
(4) within the range of the direct C2 link in an operational volume under 30 m above the overflown area (or any other altitude reference defined by the Member State of operations);
(5) following preprogrammed or preplanned flexible routes within the operational volume;
(6) in one of the following conditions:
(i) reserved or segregated airspace for UAS operations;
(ii) operating at a maximum height not exceeding 30 m from the ground;
(iii) when operating at no more than 30 m horizontally from an obstacle, operating at a maximum height not exceeding 15 m from the obstacle; if the height of the obstacle does not exceed 20 m, then the hight of the operation may be up to 30 m from the obstacle (meaning no more than a total of 50 m from the ground);
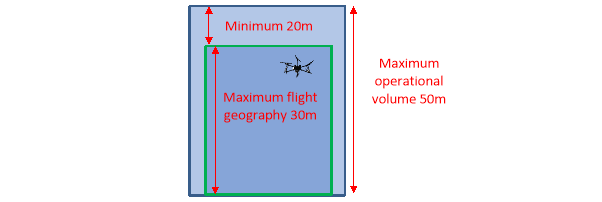
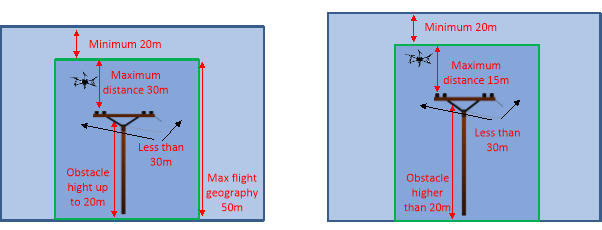
Figure 1 — Flight geography and operational volume when the operation is not conducted in reserved or segregated area
(7) operated routinely for regular inspections of facilities and infrastructure, e.g. industrial plants and similar, and operating in the atypical airspace within the shielding of such artificial obstacles as well as the natural obstacles, if any. The area of operation should be clearly identified within the application and the competent authority should issue a ‘precise’ operation authorisation according to GM1 UAS.SPEC.040(1).
Note 1: This PDRA has been tailored for routine automated surveillance operation and inspection of facilities and infrastructures. It may be used as a basis for other purposes and, thus, may require an additional risk assessment.
Note 2: Many UAS operations under this PDRA may be conducted with a high level of automation, which should be considered by the competent authorities in terms of the required level of practical-skills training and assessment, as it should be proportionate to the lower level of intervention required by the remote pilot.
(b) PDRA characterisation and conditions
The characterisation and conditions for this PDRA are summarised in Table PDRA-G03.1 below:
|
Topic |
Method of proof |
Condition |
||||||
|
1. Operational characterisation (scope and limitations) |
||||||||
|
Level of human intervention |
Self-declaration |
1.1 No autonomous operations: the remote pilot should have the ability to maintain control of the UA, except in case of a loss of the command‑and‑control (C2) link. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||
|
1.2 The remote pilot should always be able to terminate the flight. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
1.3 Either the flight path should be preprogrammed or flexible routes should be preplanned to ensure the UA avoids obstacles in the operational volume. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
1.4 The remote pilot should not hand the control of the UA over to another command unit. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
1.5 The remote pilot should not operate the UA from a moving vehicle. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
1.6 The remote pilot should not hand the control of the UA over to another command unit. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
UA range limit |
Self-declaration |
1.7 Launch/recovery: at VLOS distance from the remote pilot, if not operating from a safe prepared area. Note: ‘Safe prepared area’ means a controlled ground area that is suitable for the safe launch/recovery of the UA. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||
|
1.8 In flight: The range limit should be within the C2 link direct coverage which ensures the safe conduct of the flight. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
Overflown areas |
Declaration supported by |
1.9 UAS operations should be conducted: |
|
|
||||
|
1.9.1 over sparsely populated areas, and |
Please include a reference to the relevant chapter/section of the OM where the procedures for determining the population density are provided. |
‘I declare compliance.’ Please describe how the population density data is identified. |
||||||
|
1.9.2 over or up to 15 m horizontal distance from a facility or infrastructure at the request of the person or entity that is responsible for that facility or infrastructure. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
UA limitations |
Self-declaration |
1.10 Maximum characteristic dimensions (e.g. wingspan, rotor diameter/area or maximum distance between rotors in the case of a multirotor): up to 3 m |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||
|
1.11 Typical kinetic energy: up to 34 kJ |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
Flight height limit |
Self-declaration |
1.12 The maximum height of the operational volume should not be greater than the size of the reserved or segregated airspace, if applicable, or the height defined according to para 3.9. Note: See point 3.10 defining the air risk buffer to be considered |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||
|
Airspace |
Self-declaration |
1.13 The UA should be operated: (refer also to point 3.9) |
|
|
||||
|
1.13.1 in ‘atypical airspace’ that is included in uncontrolled airspace; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
1.13.2 in controlled airspace which the competent authority has defined it meets ‘atypical airspace’ requirements and with the relevant coordination as defined by competent authority; or |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
Visibility |
Self-declaration |
1.14 If take-off and landing are conducted in VLOS of the remote pilot, the visibility should be sufficient to ensure that no people are in danger during the take-off /landing phase. The remote pilot should abort the take-off or landing in case people on the ground are in danger. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||
|
Others |
Self-declaration |
1.15 The UA should not be used to drop material or to carry dangerous goods, except for dropping items in connection with agricultural, horticultural or forestry activities where the carriage of such items does not contravene any applicable regulations. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||
|
2. Operational risk classification (according to the classification defined in AMC1 to Article 11 of the UAS Regulation) |
||||||||
|
Final GRC |
3 |
Final ARC |
ARC-a |
SAIL |
II |
|||
|
3. Operational mitigations |
||||||||
|
Operational volume |
Self-declaration |
3.1 To determine the operational volume, the UAS operator should consider the position-keeping capabilities of the UAS in 4D space (latitude, longitude, height, and time). |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||
|
3.2 In particular, the accuracy of the navigation solution, the flight technical error of the UAS and the path definition error (e.g. map error) and latencies should be considered and addressed when determining the operational volume. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
3.3 The remote pilot should apply the emergency procedures as soon as there is an indication that the UA may exceed the limits of the operational volume. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
Ground risk |
Self-declaration |
3.4 The UAS operator should establish a ground risk buffer to protect third parties on the ground outside the operational volume. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.' |
||||
|
3.4.1 The default criterion should be the use of the ‘1:1 rule’ (e.g. if the UA is planned to operate at a height of 25 m, the ground risk buffer should at least be 25 m). |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.' |
||||||
|
3.4.2 A smaller ground risk buffer value may be applied by the applicant for a rotary wing UA using a ballistic methodology approach acceptable to the competent authority. The 1:1 rule may in certain cases not be sufficient to meet the target level of safety. In such a case, the competent authority may ask for a refinement of the definition of the ground risk buffer, based on criteria defined in SORA Step #9 depending on the adjacent air and ground risks. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.' |
||||||
|
3.5 The operational volume and the ground risk buffer should be all contained in a sparsely populated area. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.' |
||||||
|
3.6 The UAS operator should evaluate the area of operations, typically by means of on-site inspection or appraisal, and should be able to justify the significantly lower density of people at risk than in sparsely populated areas within the entire operational volume including the ground risk buffer. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.' |
||||||
|
3.7 The UAS operator should ensure that the person or entity responsible for the facility or infrastructure has taken the necessary measures to protect the uninvolved persons present within the limits of the facility or infrastructure during the UAS operation. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.' |
||||||
|
3.8 The UAS operator should include points 3.4 to 3.7 in the Operations Manual (OM) (see point 4.1.1) and declare compliance with those conditions. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.' |
||||||
|
Air risk |
Self-declaration |
3.9 The UAS operation should be conducted: 3.9.1 in ‘atypical airspace’ which, for the purpose of this PDRA, is one of the following: 3.9.1.1 in reserved or segregated airspace; the claim for ARC-a is met if a reserved or segregated airspace is established and approved for the purpose of conducting UAS operations under this PDRA, with the operational volume and air risk buffer, if applicable, being entirely contained in that reserved or segregated airspace; 3.9.1.2 at a height of the flight geography of less than 30 m; 3.9.1.3 when operating in the proximity of natural or artificial obstacles (e.g. trees, buildings, towers, cranes, fences, power lines, etc.) whose height is below 20 m, keeping the UA within the following distances: (i) 30 m horizontal distance; (ii) 30 m vertical distance from the top of the overflown obstacle; 3.9.1.4 when operating in the proximity of natural or artificial obstacles (e.g. trees, buildings, towers, cranes, fences, power lines, etc.) whose height is above 20 m, keeping the UA within the following distances: (i) 30 m horizontal distance; (ii) 15 m vertical distance from the top of the overflown obstacle; 3.9.2 away from all of the following: (i) any known permanent or temporary take-off and landings areas for all types of manned aircraft; this also includes parking lots, parks and other areas where helicopters occasionally operate from, as well as sites where police and helicopter emergency medical services (HEMS), and search and rescue (SAR) helicopters occasionally operate from in cases of accidents or other emergencies; (ii) known military aircraft low‑flying routes; (iii) any other known low-level manned aircraft operations in the intended area of operation (e.g. balloon operations authorised en route below 500 ft); (iv) harbour/coastal areas where SAR operations may transit or operate; (v) any known areas where other unmanned aircraft operate (including areas for model aircraft clubs or associations). |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||
|
3.10 The UAS operator should establish an air risk buffer to protect third parties in the air, outside the operational volume, if: 3.10.1 airspace classified as ARC-d is adjacent to the operational volume; or 3.10.2 the competent authority or the entity responsible for the airspace management considers it necessary to require that the protection of third parties in the air be ensured. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
3.11 The air risk buffer as per point 3.10 should be contained where the probability of encounter with manned aircraft and other airspace users is low, as defined by the competent authority. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
3.12 Before the flight, the UAS operator should assess the proximity of the planned UAS operation to manned aircraft activity. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
Observers |
|
n/a |
||||||
|
4. UAS operator and UAS operations conditions |
||||||||
|
UAS operator and UAS operations |
Declaration supported by |
4.1 The UAS operator should: |
|
|
||||
|
4.1.1 develop an operations manual (OM) (for the template, refer to AMC1 UAS.SPEC.030(3)(e) and to the complementary information in GM1 UAS.SPEC.030(3)(e)); |
Please describe how this condition is met. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
||||||
|
4.1.2 develop a procedure to ensure that the security requirements applicable to the area of operations are complied with during the intended operation; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
||||||
|
4.1.3 develop measures to protect the UAS against unlawful interference and unauthorised access; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
||||||
|
4.1.4 develop procedures to ensure that all operations comply with Regulation (EU) 2016/679 on the protection of natural persons with regard to the processing of personal data and on the free movement of such data. In particular, the UAS operator should carry out a data protection impact assessment, when this is required by the data protection national authority of the Member State with regard to the application of Article 35 of that Regulation; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
||||||
|
4.1.5 develop guidelines for its remote pilots to plan UAS operations in a manner that minimises nuisance, including noise and other emissions-related nuisance, to people and animals; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
||||||
|
4.1.6 develop an emergency response plan (ERP) in accordance with the conditions for a ‘medium’ level of robustness (please refer to AMC3 UAS.SPEC.030(3)(e); |
Please describe how this condition is met. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
||||||
|
4.1.7 validate the operational procedures in accordance with the provisions for a ‘medium’ level of robustness included in AMC2 UAS.SPEC.030(3)(e); |
Please describe how this condition is met. |
‘I declare compliance and that the description for meeting this condition is available to the competent authority for review.’ |
||||||
|
4.1.8 ensure the adequacy of the contingency and emergency procedures and prove it through any of the following: (a) dedicated flight tests; (b) simulations, provided that the representativeness of the simulation means is proven for the intended purpose with positive results; (c) any other means acceptable to the competent authority; |
Please describe how this condition is met |
‘I declare compliance and that the description for meeting this condition is available to the competent authority for review.’ |
||||||
|
4.1.9 have a policy that defines how the remote pilot and any other personnel in charge of duties essential to the UAS operation can declare themselves fit to operate before conducting any operation; |
Please describe how this condition is met |
‘I declare compliance and that the description for meeting this condition is available to the competent authority for review.’ |
||||||
|
4.1.10 if the operation takes place in reserved or segregated airspace, as part of the procedures that are contained in the OM (point 4.1.1 above), include the description of the following: |
|
|
||||||
|
(a) the method and means of communication with the authority or entity that is responsible for the management of the airspace during the entire period of the reserved or segregated airspace being active, as mandated by the authorisation; Note: The communication method should be published in the notice to airmen (NOTAM), which activates the reserved airspace to also allow coordination with manned aircraft. |
Please describe how this condition is met. |
‘I declare compliance and that evidence is available to the competent authority for review.’ |
||||||
|
(b) the personnel in charge of duties essential to the UAS operation, who are responsible for establishing that communication; |
Please describe how this condition is met. |
‘I declare compliance and that evidence is available to the competent authority for review.’’ |
||||||
|
4.1.11 designate for each flight a remote pilot with adequate competency and other personnel in charge of duties essential to the UAS operation if needed; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
||||||
|
4.1.12 ensure that the UAS operation effectively uses and supports the efficient use of the radio spectrum in order to avoid harmful interference; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance and that supporting evidence is included in the OM.’ |
||||||
|
4.1.13 keep for a minimum of 3 years and maintain up to date a record of the information on UAS operations, including any unusual technical or operational occurrences and other data as required by the declaration or by the operational authorisation; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance and that record‑keeping data is available to the competent authority.’ |
||||||
|
UAS maintenance |
Self-declaration |
4.2 The UAS operator should: |
|
|
||||
|
4.2.1 ensure that the UAS maintenance instructions that are defined by the UAS operator are included in the OM and cover at least the UAS manufacturer’s instructions and requirements, when applicable; and |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
4.2.2 ensure that maintenance staff follow the UAS maintenance instructions when performing maintenance; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
4.2.3 keep for a minimum of 3 years and maintain up to date a record of the maintenance activities conducted on the UAS; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
4.2.4 establish and keep up to date a list of the maintenance staff employed by the operator to carry out maintenance activities; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
4.2.5 comply with point UAS.SPEC.100, if the UAS uses certified equipment. |
Please include a reference to the relevant chapter/section of the OM or indicate ‘n/a’. |
‘I declare compliance.’ or ‘n/a’ |
||||||
|
External services |
Self-declaration |
4.3 The UAS operator should ensure that the level of performance for any externally provided service necessary for the safety of the flight is adequate for the intended operation. The UAS operator should declare that this level of performance is adequately achieved. |
Please describe how this condition is met. |
‘I declare compliance.’ |
||||
|
4.4 The UAS operator should define and allocate the roles and responsibilities between the UAS operator and the external service provider(s), if applicable. |
Please describe how this condition is met. |
‘I declare compliance.’ |
||||||
|
5. Conditions for the personnel in charge of duties essential to the UAS operation |
||||||||
|
General |
Self-declaration |
5.1 The UAS operator should ensure that all personnel in charge of duties essential to the UAS operation are provided with competency-based theoretical and practical training specific to their duties, which consists of theoretical elements defined in AMC1 UAS.SPEC.050(1)(d) and practical elements defined in AMC2 UAS.SPEC.050(1)(d). |
Please describe how this condition is met. |
‘I declare compliance. Evidence of training is available for inspection at the request of the competent authority or its authorised representative. The training programme is documented in the OM.’ |
||||
|
5.2 The UAS operator should keep and maintain up to date a record of all the relevant qualifications and training courses completed by the remote pilot and the other personnel in charge of duties essential to the UAS operation and by the maintenance staff for at least 3 years after those persons have ceased to be employed by the organisation or have changed position within the organisation. |
Please describe how this condition is met. |
‘I declare compliance. Record-keeping data is available for inspection at the request of the competent authority.’ |
||||||
|
Remote pilot |
Self-declaration |
5.3 The remote pilot has the authority to cancel or delay any or all flight operations under the following conditions: |
|
|
||||
|
5.3.1 the safety of persons is jeopardised; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
5.3.2 property on the ground is jeopardised; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
5.3.3 other airspace users are in jeopardy; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
5.3.4 there is a violation of the terms of the operational authorisation. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
5.4 The remote pilot should: |
|
|
||||||
|
5.4.1 not perform any duties under the influence of psychoactive substances or alcohol, or when they are unfit to perform their tasks due to injury, fatigue, medication, sickness or other causes; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
5.4.2 be familiar with the manufacturer’s instructions provided by the manufacturer of the UAS; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
5.4.3 obtain updated information relevant to the intended operation about any geographical zones defined in accordance with Article 15 of the UAS Regulation; and |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
5.4.4 ensure that the UAS is in a safe condition to complete the intended flight safely and, if applicable, check whether the direct remote identification is active and up to date. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
Multi-crew cooperation (MCC) |
Self-declaration |
5.5 Where multi-crew cooperation (MCC) is required, the UAS operator should: |
|
|
||||
|
5.5.1 designate the remote pilot-in-command to be responsible for each flight; |
Please include a reference to the relevant chapter/section of the OM, otherwise indicate ‘n/a’. |
‘I declare compliance.’ or ‘n/a’ |
||||||
|
5.5.2 include procedures to ensure the coordination between the remote crew members with robust and effective communication channels; those procedures should cover as a minimum the following: |
Please include a reference to the relevant chapter/section of the OM, otherwise indicate ‘n/a’. |
‘I declare compliance.’ or ‘n/a’ |
||||||
|
5.5.2.1 the assignment of tasks to the remote crew members; and |
Please include a reference to the relevant chapter/section of the OM, otherwise indicate ‘n/a’. |
‘I declare compliance.’ or ‘n/a’ |
||||||
|
5.5.2.2 the establishment of step-by-step communication; and |
Please include a reference to the relevant chapter/section of the OM, otherwise indicate ‘n/a’. |
‘I declare compliance.’ or ‘n/a’ |
||||||
|
5.6 ensure that the training of the remote crew covers MCC. |
Please include a reference to the relevant chapter/section of the OM, otherwise indicate ‘n/a’. |
‘I declare compliance.’ or ‘n/a’ |
||||||
|
Maintenance staff |
Self-declaration |
5.7 Any staff member authorised by the UAS operator to perform maintenance activities should have been duly trained regarding the documented maintenance procedures. |
Please describe how this condition is met. |
‘I declare compliance. Evidence of training is available at the request of the competent authority or its authorised representative.’ |
||||
|
Personnel in charge of duties essential to the UAS operation are fit to operate |
Self-declaration |
5.8 The personnel in charge of duties essential to the UAS operation should declare that they are fit to operate before conducting any operation based on the policy defined by the UAS operator. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||
|
6. Technical conditions |
||||||||
|
General |
Self-declaration |
6.1 The UAS should be equipped with means to monitor the critical parameters for a safe flight, and in particular the following: |
|
|
||||
|
6.1.1 UA position, height or altitude, ground speed or airspeed, attitude, and trajectory; |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
6.1.2 UAS energy status (fuel, battery charge, etc.); and |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
6.1.3 the status of critical functions and systems; as a minimum, for services based on RF signals (e.g. C2 link, GNSS, etc.), means should be provided to monitor the adequate performance and trigger an alert when the performance level becomes too low. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
6.2 The UAS performance and in particular its capability to keep the position in 4D space (latitude, longitude, height, and time) should be such that allows the remote pilot to conduct safely operations close to natural or artificial obstacles. Note: The UA should be able to fly safely at a distance closer than 30 m to artificial or natural obstacles. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
6.3 The UAS should provide means to programme the UA flight path prior to take-off, or if utilising flexible routes, be equipped with means to avoid obstacles while staying within the intended operational volume. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
6.3.1. If flexible routes are utilised, the UAS should provide means to prevent the UA from breaching the horizontal and vertical limits of a programmable operational volume. |
Please include a reference to the relevant chapter/section of the OM, otherwise indicate ‘n/a’. |
‘I declare compliance.’ |
||||||
|
6.4 The UAS should be protected against potential electromagnetic interferences from the infrastructure/facilities in the overflown area. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
Human–machine interface (HMI) |
Self-declaration |
6.5 The UAS information and control interfaces should be clearly and succinctly presented and should not confuse, cause unreasonable fatigue, or contribute to causing any disturbance to the personnel in charge of duties essential to the UAS operation such that this could adversely affect the safety of the operation. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||
|
6.6 The UAS operator should conduct a UAS evaluation that considers and addresses human factors to determine whether the HMI is appropriate for the operation. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
C2 links and communication |
Self-declaration |
6.7 The UAS should comply with the appropriate requirements for radio equipment and the use of the RF spectrum. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||
|
6.8 Protection mechanisms against interference should be used, especially if unlicensed bands (e.g. ISM) are used for the C2 link (mechanisms such as FHSS, DSSS or OFDM technologies, or frequency deconfliction by procedure). |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
6.9 The UAS should be equipped with a C2 link that is protected against unauthorised access to the C2 functions. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
6.10 In case of a loss of the C2 link, the UAS should have a reliable and predictable method for the UA to recover the C2 link or terminate the flight in a way that reduces the effect on third parties in the air or on the ground. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
6.11 In the event of an emergency, the remote pilot should have effective means to communicate with the relevant bodies. |
Please include a reference to the relevant chapter/section of the OM. |
‘I declare compliance.’ |
||||||
|
Tactical mitigation |
|
n/a |
|
|
||||
|
Containment |
Declaration supported by |
6.12 To ensure a safe recovery from a technical issue that involves the UAS or an external system that supports the operation, the UAS should comply with the following basic containment provisions: |
|
|
||||
|
6.12.1 no probable failure of the UAS or any external system that supports the operation should lead to operation outside the operational volume; and |
Please describe how this condition is met. |
‘n/a since enhanced containment applies.’ or ‘I declare compliance. A design and installation appraisal is available, and covers at least the following: — the design and installation features (independence, separation, and redundancy); and — the particular risks (e.g. hail, ice, snow, electromagnetic interference, etc.) relevant to the type of operation.’ |
||||||
|
6.12.2 it is reasonably expected that a fatality will not occur from any probable failure of the UAS, or any external system that supports the operation. Note: The term ‘probable’ should be understood in its qualitative interpretation, i.e. ‘anticipated to occur one or more times during the entire system/operational life of an item’. |
Please describe how this condition is met. |
|||||||
|
6.13 The following enhanced containment conditions should apply if the adjacent area includes an assembly of people or if the adjacent airspace is classified as ARC-c or ARC-d (in accordance with SORA): |
|
|
||||||
|
6.13.1 The UAS should be designed to standards that are considered adequate by the competent authority and/or in accordance with a means of compliance that is acceptable to that authority such that: |
Please include a reference to the relevant chapter/section of the OM or indicate ‘n/a’. |
‘N/A since the basic containment applies’ or ‘I declare compliance with MoC Light-UAS.2511. Analysis and/or test data with supporting evidence are/is available.’ or ‘The UAS has a DVR demonstrating compliance with Light-UAS.2511. |
||||||
|
6.13.1.1 the probability of the UA leaving the operational volume should be less than 10–4 /FH; and |
Please include a reference to the relevant chapter/section of the OM or indicate ‘n/a’. |
|||||||
|
6.13.1.2 no single failure of the UAS or of any external system supporting the operation should lead to operation outside the ground risk buffer. Note: The term ‘failure’ should be understood as an occurrence which affects the operation of a component, part, or element such that it can no longer function as intended. Errors may cause failures but are not considered to be failures. Some structural or mechanical failures may be excluded from the criterion if it can be shown that these mechanical parts were designed according to aviation industry best practices. |
Please include a reference to the relevant chapter/section of the OM or indicate ‘n/a’. |
|||||||
|
6.13.2 SW and AEH whose development error(s) could directly lead to operations outside the ground risk buffer should be developed according to an industry standard or methodology that is recognised as adequate by EASA. Note 1: The proposed additional safety conditions cover both the integrity and the assurance levels. Note 2: The proposed additional safety conditions do not imply a systematic need to develop the SW and AEH according to an industry standard or methodology recognised as adequate by the competent authority. For instance, if the UA design includes an independent engine shutdown function that systematically prevents the UA from exiting the ground risk buffer due to single failures or an SW/AEH error of the flight controls from occurring, the intent of the conditions of point 6.13.1 above could be considered met. Note 3: For this PDRA, having adjacent airspace classified as ARC-c like a hospital heliport in uncontrolled airspace is also deemed subject to the above additional conditions (in addition to ARC-d, as per SORA Step #9 (c)). |
Please include a reference to the relevant chapter/section of the OM or indicate ‘n/a’. |
|||||||
|
Self-declaration |
6.14 The UAS bears a unique serial number compliant with standard ANSI/CTA2063‑A‑2019, Small Unmanned Aerial Systems Serial Numbers, 2019, according to Article 40(4) of Regulation (EU) 2019/945. |
Please describe how this condition is met. |
‘I declare compliance.’ |
|||||
|
6.15 The UAS is equipped with a remote identification system according to Article 40(5) of Regulation (EU) 2019/945. |
Please describe how this condition is met. |
‘I declare compliance.’ |
||||||
|
Self-declaration |
6.16 If the UAS is operated at night, it is equipped with at least one green flashing light according to point UAS.SPEC.050(1)(l)(i) of the UAS Regulation. |
Please describe how this condition is met or indicate ‘n/a’. |
‘I declare compliance.’ or ‘n/a’ |
|||||
Table PDRA-G03.1 — Main limitations and provisions for PDRA-G03
AMC7 Article 11 Rules for conducting an operational risk assessment
ED Decision 2023/012/R
OPERATIONS OF UNMANNED FREE BALLOONS
An operation using an unmanned free balloon that complies with the provisions defined in Appendix 2 to Regulation (EU) No 923/2012 is considered meeting the safety objectives of the operational risk assessment laid down in Article 11 and thus implies compliance with this Article.
Article 12 - Authorising operations in the ‘specific’ category
Regulation (EU) 2024/1110
1. The competent authority shall evaluate the risk assessment and the robustness of the mitigating measures that the UAS operator proposes to keep the UAS operation safe in all phases of flight.
2. The competent authority shall grant an operational authorisation when:
(a) the evaluation performed pursuant to paragraph 1 concludes that:
(i) the operational safety objectives take account of the risks of the operation;
(ii) the combination of mitigation measures concerning the operational conditions to perform the operations, the competence of the personnel involved and the technical features of the unmanned aircraft, are adequate and sufficiently robust to keep the operation safe in view of the identified ground and air risks;
(b) for UAS that are or will be certified pursuant to Article 40, point 1(d) of Delegated Regulation (EU) 2019/945, the UAS have:
(i) a valid certificate of airworthiness or a restricted certificate of airworthiness and, if the UA is subject to the environmental protection requirements laid down in point 21.B.85 of Regulation (EU) No 748/2012, a valid noise certificate; or
(ii) if the UA does not meet, or has not been shown to meet, the applicable airworthiness requirements, flight conditions approved according to Subpart P of Annex I (Part 21) to Regulation (EU) No 748/2012
(c) the UAS operator has provided to the competent authority a statement confirming that the intended operation complies with any applicable Union and national rules relating to it, in particular with regard to privacy, data protection, liability, insurance, security and environmental protection.
3. When the operation is not deemed sufficiently safe, the competent authority shall inform the applicant accordingly, giving reasons for its refusal to issue the operational authorisation.
4. The operational authorisation granted by the competent authority shall detail:
(a) the scope of the authorisation;
(b) the ‘specific’ conditions that shall apply:
i to the UAS operation and the operational limitations;
ii to the required competency of the UAS operator and, where applicable, of the remote pilots;
iii to the technical features of the UAS, including the certification of the UAS, if applicable;
(c) the following information:
i the registration number of the UAS operator and the technical features of the UAS;
ii a reference to the operational risk assessment developed by the UAS operator;
iii the operational limitations and conditions of the operation;
iv the mitigation measures that the UAS operator has to apply;
v the location(s) where the operation is authorised to take place and any other locations in a Member States in accordance with Article 13;
vi all documents and records relevant for the type of operation and the type of events that should be reported in addition to those defined in Regulation (EU) No 376/2014 of the European Parliament and of the Council80 Regulation (EU) No 376/2014 of the European Parliament and of the Council of 3 April 2014 on the reporting, analysis and follow-up of occurrences in civil aviation, amending Regulation (EU) No 996/2010 of the European Parliament and of the Council and repealing Directive 2003/42/EC of the European Parliament and of the Council and Commission Regulations (EC) No 1321/2007 and (EC) No 1330/2007 (OJ L 122, 24.4.2014, p. 18)..
vii the certificate of airworthiness or restricted certificate of airworthiness and noise certificate, where such certificates have been issued;
viii the flight conditions approved in accordance with Regulation (EU) No 748/2012 where the UAS meets the conditions set out in Article 40, point 1(d) of Delegated Regulation (EU) 2019/945 and the UA does not meet, or has not been shown to meet, the applicable airworthiness requirements.
5. Upon receipt of the declaration referred to in paragraph 5 of Article 5, the competent authority shall:
(a) verify that it contains all elements set out in paragraph 2 of point UAS.SPEC.020 of the Annex;
(b) if this is the case, provide the UAS operator with a confirmation of receipt and completeness without undue delay so that the operator may start the operation.
DECLARATION, VERIFICATION AND ACKNOWLEDGEMENT OF RECEIPT
(a) The competent authority should establish an online system for the submission of operational declarations, which provides the submitter with an automatic acknowledgement of receipt when the submission has been successful.
(b) For a submission to be considered successful, the online system should check that all the required information has been provided. Otherwise, the system should indicate to the submitter which parts of the information still need to be added to complete the submission of the declaration (e.g. fields to be filled in, compliance with requirements or statements to be accepted or acknowledged, etc.).
(c) In order to facilitate cross-border operations, the acknowledgement of receipt should be written at least in English, in addition to the language of the Member State. A formula such as the following may be used:
‘The {name of the competent authority} acknowledges the receipt of the declaration submitted by {name of the UAS operator and UAS operator registration number}, on {date of submission of the declaration} related to the STS {identification of the STS}. The declaration has been found to be complete.’
Article 13 - Cross-border operations or operations outside the state of registration
Regulation (EU) 2020/639
1. When an UAS operator intends to conduct an operation in the ‘specific’ category for which an operational authorisation has already been granted in accordance with Article 12, and which is intended to take place partially or entirely in the airspace of a Member State other than the Member State of registration, the UAS operator shall provide the competent authority of the Member State of intended operation with an application including the following information:
(a) a copy of the operational authorisation granted to the UAS operator in accordance with Article 12; and
(b) the location(s) of the intended operation including the updated mitigation measures, if needed, to address those risks identified under Article 11(2)(b) which are specific to the local airspace, terrain and population characteristics and the climatic conditions.
2. Upon receipt of the application set out in paragraph 1, the competent authority of the Member State of intended operation shall assess it without undue delay and provide the competent authority of the Member State of registration and the UAS operator with a confirmation that the updated mitigation measures referred to in point (b) of paragraph 1 are satisfactory for the operation at the intended location. Upon receipt of that confirmation, the UAS operator may start the intended operation and the Member State of registration shall record the updated mitigation measures that the UAS operator has to apply in the operational authorisation issued in accordance with Article 12.
3. When an UAS operator intends to conduct an operation in the ‘specific’ category for which a declaration has been made in accordance with paragraph 5 of Article 5, and which is intended to take place partially or entirely in the airspace of a Member State other than the Member State of registration, the UAS operator shall provide the competent authority of the Member State of the intended operation with a copy of the declaration submitted to the Member State of registration, as well as a copy of the confirmation of receipt and completeness.
4. Where a UAS operator holding an LUC with privileges in accordance with point UAS.LUC.060 of the Annex intends to conduct an operation in the ‘specific category’ taking place partially or entirely in the airspace of a Member State other than the Member State of registration, the UAS operator shall provide the competent authority of the Member State of intended operation with the following information:
(a) a copy of the term of approval received in accordance with point UAS.LUC.050 of the Annex; and
(b) the location or locations of the intended operation in accordance with paragraph 1(b) of this Article.
AMC1 Article 13 Cross-border operations or operations outside the State of registration
ED Decision 2022/002/R
CROSS-BORDER OPERATIONS
(a) A UAS operator that intends to conduct an operation, for which an operational authorisation is required, partially or fully in a Member State other than the State of registration, it should firstly obtain any required authorisation for that operation from the State of registration, unless the UAS operator has a LUC with the appropriate privileges. This process applies also when the UAS operator intends to conduct an operation only in a MS other than the State of registration.
(b) The UAS operator should:
(1) identify the applicable local conditions in the area of operation;
(2) adapt the operational procedures, as necessary:
(i) to comply with the applicable local conditions81 Consisting in compliance with the provisions defined in the applicable national regulations. Local conditions should be published by each MS.; and
(ii) as required by the application to the new location(s) of the mitigation measures, identified in the operational authorisation;
(3) submit to the competent authority of the MS of operation (refer to https://www.easa.europa.eu/domains/civil-drones/naa for the links to the NAA websites) an application for a cross-border operation using the form provided in AMC1 Article 13(1), attaching the following:
(i) a copy of the operational authorisation issued by the competent authority of the MS of registration, or a copy of the LUC terms of reference if the operation is conducted under the privileges of the LUC;
(ii) those chapter(s)/section(s) of the operations manual (OM) providing the operational procedures and the relevant information, amended as necessary, to comply with the local conditions and apply the mitigation measures to the new intended location(s), unless the UAS operator holds a LUC with the appropriate privileges; and
(iii) evidence of compliance of the amended procedures (refer to point ii) according to the level of robustness of the mitigation measures, if any, unless the UAS operator has a LUC with the appropriate privileges.
(c) The competent authority of the MS of operation should, without undue delay, evaluate the information provided by the UAS operator and verify the application of local condition(s) and of the updated mitigation measures applicable to the intended location(s) of the operation.
(d) Once the competent authority of the MS of operation is satisfied, it should provide the competent authority of the MS of registration and the UAS operator with the confirmation of acceptability (refer to the template provided in AMC1 Article 13(2)) that the updated mitigation measures and procedures are satisfactory for the intended location(s).
(e) After receiving the confirmation of acceptability, the UAS operator may start its operation.
(f) The competent authority of the MS of registration should issue a revision of the operational authorisation listing the additional new location(s), and provide a copy of the revised operational authorisation to the MS of authorisation and to the UAS operator.
(g) A UAS operator that holds a LUC with the appropriate privileges listed in its terms of reference may operate without following the above procedures. However, the UAS operator:
(1) must provide to the MS of operation the application using the form provided in AMC1 Article 13(1), attaching the following:
(i) a copy of the terms of approval received in accordance with point UAS.LUC.050 of the Annex to the UAS Regulation; and
(ii) the location(s) of the intended operation in accordance with paragraph 1(b) of Article 13(1) of the UAS Regulation.
(2) If the LUC terms of reference include the privileges to assess the local conditions and to apply the mitigation measures in other locations, than the UAS operator may start the operation as soon as it has received confirmation of receipt and completeness of the application.
(3) If the LUC terms of reference do not include the privileges to assess the local conditions and/or apply the mitigation measures in other locations, than the UAS operator may start the operation only after it has received the confirmation of acceptability (refer to the template provided in AMC1 Article 13(2)) that the updated mitigation measures and procedures are satisfactory for the intended location(s).
GM1 Article 13 Cross-border operations or operations outside the state of registration
ED Decision 2019/021/R
GENERAL
The picture below illustrates an example of an authorisation, already provided by the competent authority, to conduct an operation in the Member State of registration, which is used to conduct the same operation in another Member State:

In the example, the UAS operator receives the authorisation from the competent authority of the Member State of registration where the mitigation measures are listed, and they may be adapted to the characteristics of the area of operation (e.g. the ground risk may be mitigated by flying over a river).
When the UAS operator intends to conduct the same operation in another Member State, a copy of the authorisation issued by the competent authority of the Member State of registration needs to be sent to the NAA of the Member State of the UAS operations. A number of elements of the mitigation measures may remain valid, such as the way the operator is organised, the competences of the pilot, or the characteristics of the UAS, for example. Other elements instead need to be adapted to the geography of the area of operation (e.g. the operations cannot be conducted mostly over the river, or it is necessary to identify a flight path meeting the equivalent conditions in terms of the ground risk, the local airspace, terrain and climate). On these points and also on the airspace, terrain and climate, the UAS operators are expected to review and possibly update the mitigation means, but only in relation to those elements.
The competent authority of the Member State of operation is not expected to review the full risk assessment, but to limit its activity to checking and providing the UAS operator and the competent authority of the Member State of registration with confirmation that the updated mitigation measures are satisfactory. Upon receipt of the confirmation, the UAS operator may start operating immediately, and the competent authority of registration will update the authorisation.
The picture below illustrates an example of the case when an operation complying with one of the STSs listed in Appendix 1 to the UAS Regulation is conducted in a Member State other than the state of registration:
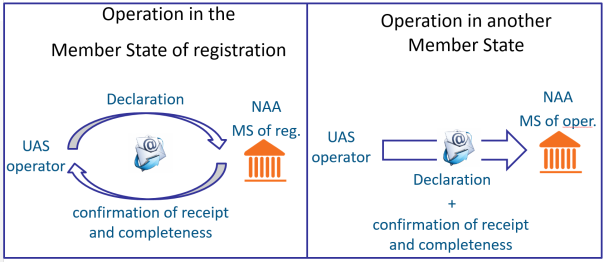
The UAS operator firstly submits the declaration to the competent authority of the Member State of registration, which, if the declaration complies with the UAS Regulation, issues a confirmation of receipt and completeness. The UAS operator will then provide the competent authority of the Member State of operations with a copy of the declaration and the confirmation of completeness received by the competent authority of the Member State of registration. There is no need for further verification.
AMC1 Article 13(1) Cross-border operations or operations outside the State of registration
ED Decision 2022/002/R
APPLICATION FORM FOR A CROSS-BORDER UAS OPERATION
|
|
Application for a cross-border UAS operation in the ‘specific’ category |
|||
|
Data protection: Personal data included in this application is processed by the competent authority pursuant to Regulation (EU) 2016/679 of the European Parliament and of the Council of 27 April 2016 on the protection of natural persons with regard to the processing of personal data and on the free movement of such data, and repealing Directive 95/46/EC (General Data Protection Regulation). Personal data will be processed for the purposes of the performance, management and follow-up of the application by the competent authority in accordance with Articles 12 and 13 of Regulation (EU) 2019/947 of 24 May 2019 on the rules and procedures for the operation of unmanned aircraft. If the applicant requires further information concerning the processing of their personal data or exercising their rights (e.g. to access or rectify any inaccurate or incomplete data), they should refer to the point of contact of their competent authority. The applicant has the right to file a complaint regarding the processing of their personal data at any time to the national data protection supervisory authority. |
||||
|
|
||||
|
New application |
Amendment to confirmation of acceptability NNN-CBO-xxxxx/yyy |
|||
|
1. UAS operator and approval data |
||||
|
1.1 UAS operator registration number |
|
|||
|
1.2 UAS operator name |
|
|||
|
1.3 Operational point of contact Name Telephone |
|
|||
|
1.4 Type of approval |
1.4.1 Operational authorisation / LUC number issued by the MS of registration |
1.4.2 Expiry date |
||
|
☐ Operational authorisation ☐ LUC |
|
DD/MM/YYYY |
||
|
2. Locations |
||||
|
2.1 Expected date of start of the operation |
DD/MM/YYYY |
2.2 Expected end date |
DD/MM/YYYY |
|
|
2.3 Intended location(s) for the operation |
|
|||
|
2.4 Operational volume height limit |
_____ m (______ ft) |
|||
|
2.5 Airspace of the intended operation |
A
U-space |
|||
|
2.6. Applicable local conditions |
|
|||
|
3. Update of the application of the mitigation means and local conditions |
||||
|
3.1 Updated ‘Location of UAS operation’ chapter of the operations manual (OM), if applicable |
|
|||
|
3.2 Compliance evidence for updated mitigation measures and local conditions, if applicable |
|
|||
|
4. Remarks |
||||
|
|
||||
|
5. Declaration of compliance |
||||
|
I, the undersigned, hereby request the confirmation of acceptability of the cross-border UAS operation in xxx (name of the Member State) and declare that the UAS operation will comply with: — any national rules related to privacy, data protection, liability, insurance, security, and environmental protection; — the applicable requirements of Regulation (EU) 2019/947; and — the limitations and conditions defined in the operational authorisation provided by the competent authority of the Member State of registration and in the confirmation of acceptability of the cross-border UAS operation provided by the competent authority of the Member State of operation. Moreover, I declare that the related insurance coverage, if applicable, will be in place at the start date of the UAS operation. |
||||
|
Date DD/MM/YYYY |
Signature and stamp |
|||

Instructions for filling in the application form
If the application relates to an amendment to a confirmation of acceptability for a cross-border UAS operation, please indicate the number of the confirmation of acceptability and fill out in red the fields that are amended compared to the last confirmation of acceptability.
1.1 UAS operator registration number in accordance with Article 14 of the UAS Regulation.
1.2 UAS operator’s name as declared during the registration process.
1.3 Contact details of the person responsible for the operation, in charge to answer possible operational questions raised by the competent authority.
1.4 Select one of the two options.
1.4.1 Number of the operational authorisation or of the LUC terms of approval issued by the competent authority of the MS of registration. The referenced document should be attached to the application.
1.4.2 Expiry date of the document listed in 1.4.2. If the validity is unlimited, indicate ‘Unlimited’.
2.1 Date on which the UAS operator expects to start the operation.
2.2 Date on which the UAS operator expects to end the operation. The UAS operator may ask for an unlimited duration; in this case, indicate ‘Unlimited’.
2.3 Location(s) in the MS of operation where the UAS operator intends to conduct the UAS operation. The identification of the location(s) should contain the full operational volume and ground risk buffer (the red line in Figure 1). The location(s) should be expressed in the same way as in the operational authorisation (e.g. ‘generic’ or ‘precise’ (refer to GM2 UAS.SPEC.030(2)).

Figure 1 — Operational area and ground risk buffer
2.4 Insert the upper limit, expressed in metres and feet in parentheses, of the contingency volume (adding the air risk buffer, if applicable) using the AGL reference when the upper limit is below 150 m (492 ft) or use the MSL reference when the upper limit is above 150 m (492 ft).
2.5 Select one or more of the nine options. Select ‘other’ in case none of the previous is applicable (i.e. military areas).
2.6 List the local conditions applicable to the location(s) defined in point 2.3 (e.g. special frequency to be avoided, national insurance regulation, etc.). If needed, a separate document may be attached.
3.1 If operational procedures need to be updated to take into account the new locations or the local conditions, indicate either the identification and revision number of the OM or the document providing an extract of the OM including the chapter describing the operational procedures and the relevant information, amended by the UAS operator. This document should be attached to the application. Otherwise indicate ‘n/a’.
3.2 If procedures are updated to address the characteristics of the new location or to meet the local conditions, indicate the compliance evidence file identification and revision number. This document should be attached to the application. Otherwise indicate ‘n/a’.
4 Free-text field for the addition of any relevant remark.
Note: In case of LUC, point 3 should not be filled in if according to the LUC terms of approval the organisation has the privilege to extend the operational authorisation to different locations.
AMC1 Article 13(2) Cross-border operations or operations outside the State of registration
ED Decision 2022/002/R
FORM FOR THE CONFIRMATION OF ACCEPTABILITY OF A CROSS-BORDER UAS OPERATION IN THE ‘SPECIFIC’ CATEGORY
|
|
Confirmation of acceptability of a cross-border UAS operation |
|
||
|
1. UAS operator and approval data |
||||
|
1.1 UAS operator registration number |
|
|||
|
1.2 UAS operator name |
|
|||
|
1.3 Operational point of contact Name Telephone |
|
|||
|
1.4 Type of approval |
1.4.1 Operational authorisation / LUC number issued by the MS of registration |
1.4.2 Expiry date |
||
|
☐ Operational authorisation ☐ LUC |
|
DD/MM/YYYY |
||
|
2. Locations |
||||
|
2.1 Location(s) for the operation |
|
|||
|
2.2 Operational volume height limit |
_____ m (______ ft) |
|||
|
3. Remarks |
||||
|
|
||||
|
4. Confirmation of acceptability |
||||
|
4.1 Confirmation number |
|
|||
|
4.2 Expiry date |
DD/MM/YYYY |
|||
|
3 Updated ‘Location of UAS operation’ chapter of the operations manual, if applicable |
|
|||
|
4.4 Compliance evidence for updated mitigations and local conditions |
|
|||
|
|
||||
|
Date DD/MM/YYYY |
Signature and stamp |
|||

 ________ (name of the competent authority) confirms that the updated mitigation measures and application of local conditions proposed by the applicant are satisfactory for the operation at the location(s) defined in point 3.1. This certificate is valid for as long as the applicant complies with the operational authorisation or the LUC terms of approval defined in point 1.4.1 of the application, with
________ (name of the competent authority) confirms that the updated mitigation measures and application of local conditions proposed by the applicant are satisfactory for the operation at the location(s) defined in point 3.1. This certificate is valid for as long as the applicant complies with the operational authorisation or the LUC terms of approval defined in point 1.4.1 of the application, with Instructions for filling in the form for the ‘Confirmation of acceptability of a cross-border UAS operation in the “specific” category’.
1.1 UAS operator registration number in accordance with Article 14 of the UAS Regulation.
1.2 Name of the UAS operator as declared during the registration process.
1.3 Contact details of the person responsible for the operation, in charge to answer possible operational questions raised by the competent authority.
1.4 Select one of the two options.
1.4.1 Number of the operational authorisation or of the LUC terms of approval issued by the competent authority of the MS of registration.
1.4.2 Expiry date of the document listed in 1.4.2. If the validity is unlimited, indicate ‘Unlimited’.
2.1 Location(s) in the MS of operation where the UAS operator is authorised to operate. The identification of the location(s) should contain the full operational volume and ground risk buffer (the red line in Figure 2). The location(s) should be expressed in the same way as in the operational authorisation (e.g. ‘generic’ or ‘precise’ (refer to GM2 UAS.SPEC.030(2)).

Figure 2 — Operational area and ground risk buffer
2.2 Insert the upper limit, expressed in metres and feet in parentheses, of the approved contingency volume (adding the air risk buffer, if applicable) using the AGL reference when the upper limit is below 150 m (492 ft), or use the MSL reference when the upper limit is above 150 m (492 ft).
3. Free-text field for the addition of any relevant remark.
4.1 Reference number of the confirmation of acceptability, as issued by the competent authority.
The number should have the following format:
NNN-CBO-xxxxx/yyy
Where:
— ‘NNN’ is the ISO 3166 Alpha-3 code of the MS that issues the confirmation of acceptability of the operational authorisation number;
— ‘CBO’ is a fixed field meaning ‘cross-border operation’;
— ‘xxxxx’ are up to 12 alphanumeric characters defining the confirmation of acceptability of the operational authorisation number; and
— ‘yyy’ are 3 alphanumeric characters defining the revision number of the confirmation of acceptability of the operational authorisation number. Each amendment of the confirmation of acceptability of the operational authorisation number will determine a new revision number.
4.2 The duration of the confirmation of acceptability of the operational authorisation may be unlimited; in this case, indicate ‘Unlimited’. The confirmation of acceptability will be valid for as long as the UAS operator complies with the relevant provisions of the UAS Regulation and with the conditions defined in the operational authorisation and in the confirmation of acceptability.
4.3 If the UAS operator has submitted to the competent authority of the MS of operation the full revised operations manual (OM), indicate its identification and revision number. Otherwise, in case only the chapter/section of the OM with the updated locations and procedures is submitted, provide its identification and revision number. In case no local conditions are identified or there is no need to update the procedures in the OM, indicate ‘n/a’.
4.4 If provided, indicate the compliance evidence file identification and revision number.
Note 1: In case of LUC, points 4.3 and 4.4 may not be filled in if according to the LUC terms of approval the organisation has the privilege to extend the operational authorisation to different locations.
Note 2: The signature and stamp may be provided in electronic form. The QR code should provide the link to the national database where the confirmation of acceptability for cross-border operations is stored.
Article 14 - Registration of UAS operators and certified UAS
Regulation (EU) 2020/639
1. Member States shall establish and maintain accurate registration systems for UAS whose design is subject to certification and for UAS operators whose operation may present a risk to safety, security, privacy, and protection of personal data or environment.
2. The registration systems for UAS operators shall provide the fields for introducing and exchanging the following information:
(a) the full name and the date of birth for natural persons and the name and their identification number for legal persons;
(b) the address of UAS operators;
(c) their email address and telephone number;
(d) an insurance policy number for UAS if required by Union or national law;
(e) the confirmation by legal persons of the following statement: ‘All personnel directly involved in the operations are competent to perform their tasks, and the UAS will be operated only by remote pilots with the appropriate level of competency’;
(f) operational authorisations and LUCs held and declarations followed by a confirmation in accordance with Article 12(5)(b).
3. The registration systems for unmanned aircraft whose design is subject to certification shall provide the fields for introducing and exchanging the following information:
(a) manufacturer’s name;
(b) manufacturer’s designation of the unmanned aircraft;
(c) unmanned aircraft’s serial number;
(d) full name, address, email address and telephone number of the natural or legal person under whose name the unmanned aircraft is registered.
4. Member States shall ensure that registration systems are digital and interoperable and allow for mutual access and exchange of information through the repository referred to in Article 74 of Regulation (EU) 2018/1139.
5. UAS operators shall register themselves:
(a) when operating within the ‘open’ category any of the following unmanned aircraft:
i. with a MTOM of 250 g or more, or, which in the case of an impact can transfer to a human kinetic energy above 80 Joules;
ii. that is equipped with a sensor able to capture personal data, unless it complies with Directive 2009/48/EC.
(b) when operating within the ‘specific’ category an unmanned aircraft of any mass.
6. UAS operators shall register themselves in the Member State where they have their residence for natural persons or where they have their principal place of business for legal persons and ensure that their registration information is accurate. A UAS operator cannot be registered in more than one Member State at a time.
Member States shall issue a unique digital registration number for UAS operators and for the UAS that require registration, allowing their individual identification.
The registration number for UAS operators shall be established on the basis of standards that support the interoperability of the registration systems;
7. The owner of an unmanned aircraft whose design is subject to certification shall register the unmanned aircraft.
The nationality and registration mark of an unmanned aircraft shall be established in line with ICAO Annex 7. An unmanned aircraft cannot be registered in more than one State at a time.
8. The UAS operators shall display their registration number on every unmanned aircraft meeting the conditions described in paragraph 5.
9. In addition to the data defined in point (2) Member States may collect additional identity information from the UAS operators.
NATIONAL CONTACT POINT FOR ACCESSING AND EXERCISING THE RIGHTS
The competent authority should identify and publish the contact point for accessing and exercising the rights in accordance with Regulation (EU) 2016/67982 Regulation (EU) 2016/679 of the European Parliament and of the Council of 27 April 2016 on the protection of natural persons with regard to the processing of personal data and on the free movement of such data, and repealing Directive 95/46/EC (General Data Protection Regulation). on the protection of natural persons with regard to the processing of personal data and on the free movement of such data.
GM1 Article 14(1) Registration of UAS operators and ‘certified’ UAS
ED Decision 2020/022/R
ACCURACY OF THE REGISTRATION SYSTEMS
UAS operators, when registering themselves or their certified UAS, are required to provide accurate information and update the registration data when it changes.
Member States are required to keep that information and registration data accurate in their registration systems.
An example of data that may change over time is:
— a UAS operator address, email address, and telephone number; and
— the validity of the insurance policy for the UAS.
To verify the validity of the insurance policy, Member States may require, at the time of registration, the UAS operator to provide the expiry date of the insurance policy and to consider the registration invalid after that date.
UAS operators, especially those conducting UAS operations for leisure, may decide to fly their UAS only for a short period; therefore, it is possible that even if the database of a registration system contains many registered UAS operators, only some of them are active. Member States may define a duration period for the validity of registration of all UAS operators and may revoke the registration number if the UAS operator does not renew that number before it expires. Member States may also decide to suspend or revoke the registration number if the UAS operator’s conduct justifies such a measure.
AMC1 Article 14(6) Registration of UAS operators and ‘certified’ UAS
ED Decision 2020/022/R
UAS OPERATOR REGISTRATION NUMBER
(a) The unique UAS operator digital registration number that is issued by the Member States should consist of sixteen (16) alphanumerics in total, arranged as follows:
(1) the first three (3) alphanumerics (upper-case only) corresponding to the ISO 3166 Alpha‑3 code of the Member State of registration;
(2) followed by twelve (12) randomly generated characters that consist of alphanumerics (lower-case only); and
(3) one (1) character corresponding to the checksum that is generated in line with point (c).
(b) The Member States should randomly generate three (3) additional alphanumerics (lower-case only) called ‘secret digits’.
(c) The Member States should generate a checksum by applying the Luhn-mod-36 algorithm to the fifteen (15) alphanumerics that result from the concatenation, in the following order, of:
(1) the twelve (12) alphanumerics of the UAS operator registration number defined in point (a)(2); and
(2) the three (3) randomly generated ‘secret digits’ that are defined in point (b).
(d) For the Luhn-mod-36 algorithm, the mapping of the alphanumerics to the code-points should start with digits that are followed by lower-case letters, as shown below:
|
Alphanumeric |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
a |
b |
c |
d |
e |
f |
… |
z |
|
Code-point |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
… |
35 |
(e) At the time of registration, the Member State should provide the UAS operator with the full registration string that consists, in the following order, of:
(1) the UAS operator registration number as defined in point (a); and
(2) the three (3) randomly generated ‘secret digits’, separated by a hyphen ‘-’ (ASCII code [DEC] 45).
GM1 to AMC1 Article 14(6) Registration of UAS operators and ‘certified’ UAS
ED Decision 2020/022/R
UAS OPERATOR REGISTRATION NUMBER
An example of a UAS operator registration number as defined in point (a) of AMC1 Article 14(6) Registration of UAS operators and ‘certified’ UAS is ‘FIN87astrdge12k8’, where:
— ‘FIN’ is the ISO 3166 Alpha-3 code of Finland;
— ‘87astrdge12k’ is an example of the twelve (12) alphanumerics, as defined in point (a)(2) of AMC1 Article 14(6); and
— ‘8’ is the checksum, i.e. the result of the application of the Luhn-mod-36 algorithm to the fifteen (15) alphanumerics that result from the concatenation of the twelve (12) alphanumerics of the UAS operator registration number and the three (3) randomly generated alphanumerics (‘secret digits’, as defined in point (b) of AMC1 Article 14(6)): ‘87astrdge12kxyz’.
An example of the full registration string, as defined in point (e) of AMC1 Article 14(6), to be provided by a Member State, is ‘FIN87astrdge12k8-xyz’, where:
— ‘FIN87astrdge12k8’ is the UAS operator registration number; and
— ‘xyz’ is an example of the three (3) randomly generated ‘secret digits’.
The UAS operator must upload the UAS registration number and the three (3) ‘secret digits’ into the remote identification system of the UAS, if available, or into the electronic-identification system, if required by the geographical zone.
The UAS operator should not share with anybody the three (3) ‘secret digits’ that are used to enhance the protection of the UAS operator registration number from being illegally uploaded into a UA.
DISPLAY OF REGISTRATION INFORMATION
(a) If the UAS operator owns the UAS or uses a UAS that is owned by a third party, it should:
(1) register itself;
(2) display on the UA the UAS operator registration number, which is received at the end of the registration process, in a way that the number is readable at least when the UA is on the ground, without using other devices than eyeglasses or corrective lenses; and
(3) upload the full string, which consists of the UAS operator registration number and the three (3) randomly generated alphanumerics, into the electronic identification system, if available.
(b) A QR code (quick response code) may be used.
(c) If the size of the UA does not allow the mark to be displayed in a visible way on the fuselage, or the UA represents a real aircraft where affixing the marking on the UA would spoil the realism of the representation, a marking inside the battery compartment is acceptable if the compartment is accessible.
Article 15 - Operational conditions for UAS geographical zones
Regulation (EU) 2020/639
1. When defining UAS geographical zones for safety, security, privacy or environmental reasons, Member States may:
(a) prohibit certain or all UAS operations, request particular conditions for certain or all UAS operations or require a prior flight authorisation for certain or all UAS operations;
(b) subject UAS operations to specified environmental standards;
(c) allow access to certain UAS classes only;
(d) allow access only to UAS equipped with certain technical features, in particular remote identification systems or geo awareness systems.
2. On the basis of a risk assessment carried out by the competent authority, Member States may designate certain geographical zones in which UAS operations are exempt from one or more of the ‘open’ category requirements.
3. When pursuant to paragraphs 1 or 2 Member States define UAS geographical zones, for geo awareness purposes they shall ensure that the information on the UAS geographical zones, including their period of validity, is made publicly available in a common unique digital format.
GM1 Article 15 Operational conditions for UAS geographical zones
ED Decision 2022/002/R
MEANS TO INFORM MANNED AVIATION OF UAS GEOGRAPHICAL ZONES
Depending on the duration of the validity of a UAS geographical zone, Member States may use AIPs and NOTAMs, as deemed appropriate, to inform manned aviation of:
— UAS geographical zones in which UASs are exempted from one or more of the ‘open’ category requirements in accordance with Article 15(2) of the UAS Regulation;
— other UAS geographical zones which are of relevance for manned aviation (e.g. U-space).
For temporary zones, NOTAMs may be used whereas for zones with longer duration, a publication in the AIP is more appropriate.
AMC1 Article 15(1) Operational conditions for UAS geographical zones
ED Decision 2022/002/R
CROSS-BORDER UAS GEOGRAPHICAL ZONE(S)
When more than one Member State decide to designate a cross-border UAS geographical zone(s), those Member States should establish coordination procedures in accordance with Article 19(1) of the UAS Regulation. Those coordination procedures should indicate which country codes should be used for the identification of the zone(s).
AMC2 Article 15(1) Operational conditions for UAS geographical zones
ED Decision 2022/002/R
DATA INTEGRITY
When data related to the UAS geographical zones described in GM3 to Article 15(1) Example 2 is processed, as a minimum, data integrity is ensured as prescribed in Part-ATM/ANS.OR.A.085(b)(2) ‘Aeronautical data quality management’ and in Part-AIS.TR.200(c) ‘General’ of Commission Implementing Regulation (EU) 2017/373 of 1 March 201783.
GM2 Article 15(1) Operational conditions for UAS geographical zones
ED Decision 2022/002/R
GENERAL ASPECTS
In line with the Chicago Convention84 ICAO Doc 7300 — Convention on International Civil Aviation., UAS geographical zones with restrictions and prohibitions should not be designated over the high seas / international airspace.
UAS geographical zones are defined in accordance with policies and procedures established by the Member States. Various entities (e.g. public institutions, law enforcement authorities, ANSPs, local authorities, nature park authorities, the military, etc.) may initiate the identification of UAS geographical zones. The initiating entity may provide the approving entity with the data on the UAS geographical zone(s) together with supporting material in accordance with the Member States’ arrangements for validation and confirmation or approval, as necessary.
Formal arrangements between the initiating entity and the entity that processes the data for the identification of the UAS geographical zone(s) may be considered. Such formal arrangements may include specific requirements on data quality.
If a flight authorisation is required to enter a UAS geographical zone, the Member States should also establish the related procedure and designate the entity responsible for providing such authorisation.
GM3 Article 15(1) Operational conditions for UAS geographical zones
ED Decision 2022/002/R
DATA QUALITY
When establishing UAS geographical zones, the Member States may require specific data quality requirements based on the purpose and location of a given zone.
Example 1
If a UAS geographical zone is of relevance to manned aviation (e.g. U-space or zones established according to Article 15(2)) of the UAS Regulation, it should, as far as practicable, comply with the data quality requirements applicable to prohibited/restricted/danger areas included in Appendix 1 ‘Aeronautical data catalogue’ to Annex III (Part-ATM/ANS.OR) to Commission Implementing Regulation (EU) 2017/37385.
Example 2
If a UAS geographical zone is relevant to UAS operations only, for example, over terrain that contains one of the infrastructures or areas/zones listed below, the MS may adapt the data quality requirements (e.g. accuracy) defined in Appendix 1 ‘Aeronautical data catalogue’ to Annex III (Part‑ATM/ANS.OR) to Commission Implementing Regulation (EU) 2017/373 to the peculiarities of UAS operations:
— highways, express ways, and roads,
— railroads,
— hospitals,
— artworks,
— rural and urban areas,
— local restrictions to reduce noise, climate, and nature impact,
— nature parks,
— reserved areas,
— populated areas,
— bridges,
— critical sites,
— secure areas,
— electrical power lines,
— zones forbidden for aerial photography,
— harbour areas,
— industrial areas,
— emergency drone zones (e.g. areas for stacking or emergency landings in the event of traffic conflicts or equipment failure).
GM1 Article 15(2) Operational conditions for UAS geographical zones
ED Decision 2022/002/R
EXEMPTION(S) FROM ONE OR MORE OF THE REQUIREMENTS FOR UAS OPERATIONS IN THE ‘OPEN’ CATEGORY
Member States may designate UAS geographical zones in which UAS operations are exempted from one or more of the requirements for the ‘open’ category. UAS operators, when complying with the remaining requirements for the ‘open’ category, may operate without the need to apply for an operational authorisation.
GM2 Article 15(2) Operational conditions for UAS geographical zones
ED Decision 2022/002/R
EXEMPTION(S) FROM ONE OR MORE OF THE REQUIREMENTS FOR UAS OPERATIONS IN THE ‘OPEN’ CATEGORY
Examples of operations that the Member States may authorise in UAS geographical zones without an application for an operational authorisation are:
— operations in the ‘open’ category, conducted with UASs that exceed 25 kg (a different mass threshold may be defined by the Member States);
— operations in the ‘open’ category, conducted at a height that exceeds 120 m (a different height threshold may be defined by the Member States).
Exemptions may also apply to all categories, for example, geographical zones where UASs are exempted from some technical features, such as electronic identification or geo-awareness.
AMC1 Article 15(3) Operational conditions for UAS geographical zones
ED Decision 2022/002/R
COMMON UNIQUE DIGITAL FORMAT
The ‘common unique digital format’ should be as described in Chapter 8 ‘UAS restriction zone data model’ and Appendix 2 ‘INFORMATION DEFINITION AND DATA STRUCTURES’ of EUROCAE ED‑269 ‘MINIMUM OPERATIONAL PERFORMANCE STANDARD FOR GEOFENCING’, Edition June 2020.
AMC2 Article 15(3) Operational conditions for UAS geographical zones
ED Decision 2022/002/R
PUBLICATION OF INFORMATION ON UAS GEOGRAPHICAL ZONES IN THE AERONAUTICAL INFORMATION PRODUCTS AND SERVICES
(a) The Member States should publish in Section ENR 5.3.1 ‘Other activities of a dangerous nature’ of the aeronautical information publication (AIP) the information on where and how the data on UAS geographical zones is publicly available in the common unique digital format.
(b) The Member States should publish information on UAS geographical zones that are relevant to manned aircraft operations in Section ENR 5.1 ‘Prohibited, restricted and danger areas’ of the AIP.
(c) In addition to making UAS geographical zones publicly available in the common unique digital format, the Member States, when publishing data in the AIP, should ensure consistency.
AMC3 Article 15(3) Operational conditions for UAS geographical zones
ED Decision 2022/002/R
CROSS-BORDER UAS GEOGRAPHICAL ZONE(S)
All affected neighbouring Member States should make data available for the entire cross-border UAS geographical zone including the part(s) that is (are) located in their own territory and the part(s) that is (are) located in the territory(ies) of the neighbouring State(s) (the responsibility for data quality of the respective parts remains with the respective Member State). The conditions for the coordination process should ensure consistency across all resulting data sets.
AMC4 Article 15(3) Operational conditions for UAS geographical zones
ED Decision 2022/002/R
PUBLICATION OF MAPS OF UAS GEOGRAPHICAL ZONES
When Member States decide to publish maps of UAS geographical zones on their website or via smartphone applications, in addition to the data made available in the common unique digital format, consistency with Chapter 8 of ED-269, Edition June 2020, should be ensured.
The Member States should ensure consistency with the relevant aeronautical information publication (AIP) data in cases where a UAS geographical zone is at the same time established and published for the purpose of manned aviation. This, for instance, is the case for U-space airspace.
GM1 Article 15(3) Operational conditions for UAS geographical zones
ED Decision 2022/002/R
EXAMPLES OF MAPS OF UAS GEOGRAPHICAL ZONES WITH COLOUR-CODE INDEX
Note: The following examples, including colour codes and explanations, are courtesy of the ‘Latvijas gaisa satiksme’, the Latvian ANSP, for the purpose of illustration only and should not be used for UAS operations.
The examples represent a possible approach of a Member State to present UAS geographical zones in a way which is proven to be compliant with the ED-269 standard. A maximum level of standardisation/harmonisation would be beneficial for the EU-wide implementation of Article 15 of the UAS Regulation.
This example provides a simplified and clearly understandable way to visualise UAS geographical zones to non-ATM professionals. The set of colours is limited to the three colours of the traffic light scheme illustrating the purpose of a UAS geographical zone.
Detailed information related to a respective UAS geographical zone, such as details of restrictions, maximum height, maximum noise level, application procedure for flight authorisation, etc., may be provided when the UAS operator selects the respective zone on the website or on the smartphone application.
|
COLOUR CODE |
MEANING |
|
UAS geographical zones where UAS operations are prohibited. However, restrictions may be waived for particular users. UAS operations in some UAS geographical zones may be subject to the fulfilment of special requirements, e.g. compliance with published procedures, request for flight authorisation, etc. The competent authority should publish the conditions for obtaining the waiver and the point of contact of the entity from which the flight authorisation needs to be requested. |
|
|
UAS geographical zones where UAS operations are limited and subject to the fulfilment of a set of conditions that are imposed for such zones. Such limitations and conditions may concern administrative procedures, operational limitations, or technical requirements for the UAS or mandatory functions. For example, UAS operations are permitted in such UAS geographical zones if the UAS MTOM does not exceed 1.5 kg and the flight altitude is below 50 m above the ground. |
|
|
UAS geographical zones that facilitate UAS operations in the ‘open’ category (UAS operations are exempt from one or more of the ‘open’ category requirements). |
|
|
U-space airspace where UAS operations are supported by a set of U‑space services. UAS operations are compliant with the capability and performance requirements that are determined for the particular U-space airspace. The Member States should list the U-space service provider(s) (USSP(s)) that is (are) identified for that geographical zone. |
|
|
|
Riga flight information region (FIR) boundary. |



Figure 1 — Example of UAS geographical zones

Figure 2 — Example of UAS geographical including representation of planned U-space
Article 16 - UAS operations in the framework of model aircraft clubs and associations
Regulation (EU) 2019/947
1. Upon request by a model aircraft club or association, the competent authority may issue an authorisation for UAS operations in the framework of model aircraft clubs and associations.
2. The authorisation referred to in paragraph 1 shall be issued in accordance with any of the following:
(a) relevant national rules;
(b) established procedures, organisational structure and management system of the model aircraft club or association, ensuring that:
i. remote pilots operating in the framework of model aircraft clubs or associations are informed of the conditions and limitations defined in the authorisation issued by the competent authority;
ii. remote pilots operating in the framework of model aircraft clubs or associations are assisted in achieving the minimum competency required to operate the UAS safely and in accordance with the conditions and limitations defined in the authorisation;
iii. the model aircraft club or association takes appropriate action when informed that a remote pilot operating in the framework of model aircraft clubs or associations does not comply with the conditions and limitations defined in the authorisation, and, if necessary, inform the competent authority;
iv. the model aircraft club or association provides, upon request from the competent authority, documentation required for oversight and monitoring purposes.
3. The authorisation referred to in paragraph 1 shall specify the conditions under which operations in the framework of the model aircraft clubs or associations may be conducted and shall be limited to the territory of the Member State in which it is issued.
4. Member States may enable model aircraft clubs and associations to register their members into the registration systems established in accordance with Article 14 on their behalf. If this is not the case, the members of model aircraft clubs and associations shall register themselves in accordance with Article 14.
GENERAL
Unless differently provided by national regulation, a model aircraft club and association may obtain from the national competent authority an authorisation that is valid for all their members to operate UA according to conditions and limitations tailored for the club or association.
The model aircraft club and association will submit to the competent authority the procedures that all members are required to follow. When the competent authority is satisfied with the procedures, organisational structure and management system of the model aircraft club and association, it may provide an authorisation that defines different limitations and conditions from those in the UAS Regulation. The authorisation will be limited to the operations conducted within the authorised club or association and within the territory of the Member State of the authorised competent authority. The authorisation cannot exempt members of the club or association from registering themselves according to Article 14 of the UAS Regulation; however, it may allow a model club or association to register their members on their behalf.
The authorisation may also include operations by persons who temporarily join in with the activities of the club or association (e.g. for leisure during holidays or for a contest), as long as the procedures provided by the club or association define conditions acceptable to the competent authority.
OPTIONS TO OPERATE A MODEL AIRCRAFT
Model flyers have the following options to conduct their operations:
(a) They may operate as members of a model club or association that has received from the competent authority an authorisation, as defined in Article 16 of the UAS Regulation. In this case, they should comply with the procedures of the model club or association in accordance with the authorisation. The authorisation should define all the deviations from the aforementioned Regulation granted to the model club or association’s members. Members must register themselves in accordance with Article 14 of the UAS Regulation, except when the model aircraft clubs and associations have obtained from the Member State the right to register their members in the registration system.
(b) In accordance with Article 15(2) of the UAS Regulation, Member States may define zones where UAS are exempted from certain technical requirements, and/or where the operational limitations are extended, including mass or height limitations. They may also define different height limitations for those zones.
(c) The UAS may be operated in Subcategory A3, in which the following categories of UAS are allowed to fly according to the limitations and conditions defined in UAS.OPEN.040:
(1) UAS with a class C0, C1, C2, C3, C4 CE mark;
(2) UAS that meet the requirements defined in Article 20(b) of the UAS Regulation; and
(3) privately built UAS with MTOMs of less than 25 kg.
ACTION IN CASES OF OPERATIONS/FLIGHTS THAT EXCEED THE CONDITIONS AND LIMITATIONS DEFINED IN THE OPERATIONAL AUTHORISATION
When a model club or association is informed that a member has exceeded the conditions and limitations defined in the operational authorisation, appropriate measures will be taken, proportionate to the risk posed. Considering the level of risk, the model club or association decides whether the competent authority should be informed. In any case, occurrences that cause an injury to persons or where the safety of other aircraft was compromised, as defined in Article 125 of Regulation (EU) 2018/113990 Regulation (EU) 2018/1139 of the European Parliament and of the Council of 4 July 2018 on common rules in the field of civil aviation and establishing a European Union Aviation Safety Agency, and amending Regulations (EC) No 2111/2005, (EC) No 1008/2008, (EU) No 996/2010, (EU) No 376/2014 and Directives 2014/30/EU and 2014/53/EU of the European Parliament and of the Council, and repealing Regulations (EC) No 552/2004 and (EC) No 216/2008 of the European Parliament and of the Council and Council Regulation (EEC) No 3922/91., must be reported by the model club or association to the competent authority.
Article 17 - Designation of the competent authority
Regulation (EU) 2019/947
1. Each Member State shall designate one or more entities as the competent authority for the tasks referred to in Article 18.
2. Where a Member State designates more than one entity as a competent authority it shall:
(a) clearly define the areas of competence of each competent authority in terms of responsibilities;
(b) establish appropriate coordination mechanism between those entities to ensure the effective oversight of all organisations and persons subject to this Regulation.
GENERAL
Member States may also designate an entity as a competent authority only for specific tasks. It should be highlighted that in such a case, this entity must comply with Article 62(3) of Regulation (EU) 2018/1139 and is the one that will be audited by EASA under Article 85 (monitoring of Member State) of the same Regulation.
Article 18 - Tasks of the competent authority
Regulation (EU) 2019/947
The competent authority shall be responsible for:
(a) enforcing this Regulation;
(b) issuing, suspending or revoking certificates of UAS operators and licenses of remote pilots operating within the ‘certified’ category of UAS operations;
(c) issuing remote pilots with a proof of completion of an online theoretical knowledge examination according to points UAS.OPEN.020 and UAS.OPEN.040 of the Annex and issuing, amending, suspending, limiting or revoking certificates of competency of remote pilots according to point UAS.OPEN.030 of the Annex;
(d) issuing, amending, suspending, limiting or revoking operational authorisations and LUCs and verifying completeness of declarations, which are required to carry out UAS operations in the ‘specific’ category of UAS operations;
(e) keeping documents, records and reports concerning UAS operational authorisations, declarations, certificates of competency of the remote pilots and LUCs;
(f) making available in a common unique digital format information on UAS geographical zones identified by the Member States and established within the national airspace of its State;
(g) issuing a confirmation of receipt and completeness in accordance with Article 12(5)(b) or a confirmation in accordance with paragraph 2 of Article 13;
(h) developing a risk-based oversight system for:
i. UAS operators that have submitted a declaration or hold an operational authorisation or an LUC;
ii. model clubs and associations that hold an authorisation referred to in Article 16;
(i) for operations other than those in the ‘open’ category, establishing audit planning based on the risk profile, compliance level and the safety performance of UAS operators who have submitted a declaration, or hold a certificate issued by the competent authority;
(j) for operations other than those in the ‘open’ category, carrying out inspections with regard to UAS operators who have submitted a declaration or hold a certificate issued by the competent authority inspecting UAS and ensuring that UAS operators and remote pilots comply with this Regulation;
(k) implementing a system to detect and examine incidents of non-compliance by UAS operators operating in the ‘open’ or ‘specific’ categories and reported in accordance with paragraph 2 of Article 19;
(l) providing UAS operators with information and guidance that promotes the safety of UAS operations;
(m) establishing and maintaining registration systems for UAS whose design is subject to certification and for UAS operators whose operation may present a risk to safety, security, privacy, and protection of personal data or the environment.
ENFORCEMENT
Member States are responsible for enforcing the UAS Regulation, and it is their decision to nominate the competent authority. In making this decision, Member States should consider that most of the UAS operations will occur in areas far from aerodromes, and therefore, the selected competent authority should employ personnel able to verify that the UAS operations conducted in such areas are safe. In addition, the issues that are likely to occur more often will be related to noise, privacy and security. Taking all this into account, law enforcement authorities may be well-placed to fulfil that role. Law enforcement authorities may take different forms, depending on the Member State’s national legal framework.
DOCUMENTS, RECORDS AND REPORTS TO BE RETAINED
(a) The competent authority should retain at least the following documentation:
(1) operational authorisations, in accordance with Article 12(2) of the UAS Regulation:
(i) the initial application for an authorisation as defined in UAS.SPEC.030(3) of Part-B and the associated documents;
(ii) the application(s) for updated operational authorisations;
(iii) the final version of the risk assessment performed by the UAS operator, and the supporting material;
(iv) the UAS operator’s statement confirming that the intended UAS operation complies with any applicable European Union and national rules relating to it, in particular with regard to privacy, data protection, liability, insurance, security and environmental protection, in accordance with Article 12(2)(c) of the UAS Regulation;
(v) the procedures to ensure that all operations comply with Regulation (EU) 2016/679 on the protection of natural persons with regard to the processing of personal data and on the free movement of such data;
(vi) confirmation by the competent authority of the Member State of operation that the updated mitigation measures are satisfactory for the operation at the intended location in accordance with Article 13(2) of the UAS Regulation;
(vii) when applicable, a procedure for coordination with the relevant service provider for the airspace if the entire operation, or part of it, is to be conducted in controlled airspace; and
(viii) up-to-date operational authorisation(s) with a table outlining successive changes;
(2) declarations in accordance with Article 12(5) of the UAS Regulation:
(i) up-to-date declarations with a table outlining successive changes;
(ii) up-to-date confirmations of receipt and completeness, provided in accordance with Article 12(5)(b) of the UAS Regulation, with a table outlining successive changes;
(3) remote pilots’ competency:
(i) proof of competency for remote pilots that have passed the online theoretical knowledge examination in accordance with UAS.SPEC.020(4)(b) of Part-B;
(ii) certificates of remote pilot competency for remote pilots that have passed the examination in accordance with UAS.SPEC.030(2)(c) of Part-B, with the declaration of completion of the practical self-training provided by the remote pilot; and
(iii) proof of competency or other certificates for remote pilots, as required by the STSs as defined in Appendix 1 to the UAS Regulation or the operational authorisations;
(4) Light UAS Operator Certificates:
(i) initial applications in accordance with UAS.LUC.010(2) of Part-C and associated documents;
(ii) applications for amendments to an existing LUC, and the associated documents; and
(iii) up-to-date terms of approval in accordance with UAS.LUC.050 of Part-C, with a table outlining the successive changes.
(5) Documentation related to audits and inspections regarding the oversight of the competent authority by EASA, as well as the oversight of UAS operators and other entities by the competent authority. This documentation should include at least the following:
(i) training, qualifications, and authorisation of team leaders and team members of the competent authority;
(ii) audit/inspection programmes;
(iii) reports, including at least the following information:
— objectives of the audit/inspection;
— date of the audit/inspection;
— type of the audit (on-site, off-site);
— personnel involved;
— summary of the main elements discussed;
— reference to the related evidence.
Note: In case of off-site audits/inspections, it should also be indicated the extent to which remote information and communication technology (ICT) has been used in conducting the audit and the effectiveness of the ICT in achieving the audit/inspection objectives. Other aspects to be considered in case of off-site activities are digital data protection and security of access.
(iv) findings and related evidence;
(v) agreed corrections and corrective actions; and
(vi) closure of findings of non-conformities and related evidence.
(b) The records should be kept for at least 3 years after their validity date expires.
GUIDELINES FOR RISK-BASED OVERSIGHT (RBO)
NOTE: The guidelines below are based on the document ‘Practices for risk-based oversight’, which may be found at the address below, and where further information may also be found:
https://www.easa.europa.eu/document-library/general-publications/practices-risk-based-oversight
That document:
— highlights the relationship between RBO and the (safety) management system, the management of change, the overall performance of the organisation and the oversight cycle;
— describes the interconnection, availability and exchange of data, which will significantly change the relationship between the authority and their regulated entities, as well as their ongoing management of safety;
— does not constitute regulatory material nor means of compliance nor guidance material. It reflects the RBO state of play to date, in an effort to gain a common understanding and to look ahead; and
— can be used as guidelines for competent authorities who have to implement RBO.
(a) General Definitions:
(1) Oversight: the function by means of which a competent authority ensures that the applicable requirements are met by regulated entities.
(2) Risk profile: the element of risks that are inherent to the nature and operations of the regulated entity, this includes the:
— specific nature of the organisation;
— complexity of its activities; and
— risks stemming from the activities carried out.
(3) Safety performance: the demonstration of how effectively a regulated entity can mitigate its risks, substantiated through the proven ability to:
— comply with the applicable requirements;
— implement and maintain effective safety management;
— identify and manage safety risks; and
— achieve and maintain safe operations.
The results of past certification or oversight also need to be taken into account.
(4) RBO: a way of performing oversight, in which:
— planning is driven by the combination of the risk profile and safety performance; and
— execution focuses on the management of risk, besides ensuring compliance.
(b) The RBO scheme is summed-up by the drawing below:

(1) the risk profile and oversight are described in paragraph 3 of the ‘Practices for risk-based oversight’;
(2) the management of safety information and information sharing with other authorities are described in paragraph 4 of ‘Practices for risk-based oversight’;
(3) the training and qualification of inspectors are described in paragraph 4.3 of ‘Practices for risk-based oversight’;
(4) conducting risk-based audits is described in paragraph 5 of ‘Practices for risk-based oversight’.
Article 19 - Safety information
Regulation (EU) 2024/1110
1. The competent authorities of the Member States and market surveillance and control authorities referred to in Article 36 of Delegated Regulation (EU) 2019/945 shall cooperate on safety matters and establish procedures for the efficient exchange of safety information.
2. Each UAS operator shall report to the competent authority on any safety-related occurrence and exchange information regarding its UAS in compliance with Regulation (EU) No 376/2014.
3. The European Union Aviation Safety Agency (‘the Agency’) and the competent authorities shall collect, analyse and publish safety information concerning UAS operations in their territory in accordance with Article 119 of Regulation (EU) 2018/1139 and its implementing acts.
4. Upon receiving any of the information referred to in paragraphs 1, 2 or 3, the Agency and the competent authority shall take the necessary measures to address any safety issues on the best available evidence and analysis, taking into account interdependencies between the different domains of aviation safety, and between aviation safety, cyber security and other technical domains of aviation regulation.
5. Where the competent authority or the Agency takes measures in accordance with paragraph 4, it shall immediately notify all relevant interested parties and organisations that need to comply with those measures in accordance with Regulation (EU) 2018/1139 and its implementing acts.
6. Notwithstanding Regulation (EU) No 376/2014, the UAS operator of an unmanned aircraft which design is certified shall report to the design approval holder of the UAS or of the UAS component any safety-related event or condition of the UAS or the UAS component identified by the organisation. In particular, the UAS operator shall report any accident or serious incident involving the UAS or the UAS component, which endangers or, if not duly corrected or addressed, could endanger the safety of the UAS or of any natural or legal person.
EXCHANGE OF SAFETY INFORMATION
Cooperation between competent authorities should be organised pursuant to Article 61 of Regulation (EU) 2018/1139. Cooperation between market surveillance authorities and the exchange of safety‑related and non-compliance information should be organised pursuant to Regulation (EC) No 765/200891 Regulation (EC) No 765/2008 of the European Parliament and of the Council of 9 July 2008 setting out the requirements for accreditation and market surveillance relating to the marketing of products and repealing Regulation (EEC) No 339/93 (OJ L 218, 13.8.2008, p. 30).. Article 19 of the UAS Regulation is intended to help organise the information flow and cooperation between the competent authorities on the one hand, and between the market surveillance authorities on the other.
Cooperation should be organised primarily at the Member State level. All the competent authorities concerned should make the best use of the information systems defined in Articles 22 ‘Exchange of information — Community Rapid Information System’ and 23 ‘General information support system’ of Regulation (EC) No 765/2008, as well as of the occurrence-reporting system of Regulation (EU) No 376/2014.
GM1 Article 19(1) Safety information
ED Decision 2022/002/R
CROSS-BORDER GEOGRAPHICAL ZONE(S)
The coordination among the Member States includes the designation of cross-border geographical zones as per AMC1 Article 15(1).
OCCURRENCE REPORT
According to Regulation (EU) No 376/2014, occurrences shall be reported when they refer to a condition which endangers, or which, if not corrected or addressed, would endanger an aircraft, its occupants, any other person, equipment or installation affecting aircraft operations. Obligations to report apply in accordance with Regulation (EU) No 376/2014, namely its Article 3(2), which limits the reporting of events for operations with UA for which a certificate or declaration is not required, to occurrences and other safety-related information involving such UA if the event resulted in a fatal or serious injury to a person, or it involved aircraft other than UA.
Article 20 - Particular provisions concerning the use of certain UAS in the ‘open’ category
Regulation (EU) 2022/425
UAS types within the meaning of Decision No 768/2008/EC of the European Parliament and of the Council92 Decision No 768/2008/EC of the European Parliament and of the Council of 9 July 2008 on a common framework for the marketing of products, and repealing Council Decision 93/465/EEC (OJ L 218 13.8.2008, p. 82)., which do not comply with Delegated Regulation (EU) 2019/945 and which are not privately‑built are allowed to continue to be operated under the following conditions, when they have been placed on the market before 1 January 2024:
(a) in subcategory A1 as defined in Part A of the Annex, provided that the unmanned aircraft has a maximum take-off mass of less than 250 g, including its payload;
(b) in subcategory A3 as defined in Part A of the Annex, provided that the unmanned aircraft has a maximum take-off mass of less than 25 kg, including its fuel and payload.
Article 21 - Adaptation of authorisations, declarations and certificates
Regulation (EU) 2020/746
1. Authorisations granted to UAS operators, certificates of remote pilot competency and declarations made by UAS operators or equivalent documentation, issued on the basis of national law, shall remain valid until 1 January 2022.
2. By 1 January 2022 Member States shall convert their existing certificates of remote pilot competency and their UAS operator authorisations or declarations, or equivalent documentation, including those issued until that date, in accordance with this Regulation.
3. Without prejudice to Article 14, UAS operations conducted in the framework of model aircraft clubs and associations shall be allowed to continue in accordance with relevant national rules and without an authorisation in accordance with Article 16 until 1 January 2023.
Article 22 - Transitional provisions
Regulation (EU) 2022/425
Without prejudice to Article 20, the use of UAS in the ‘open’ category which do not comply with the requirements of Parts 1 to 5 of the Annex to Commission Delegated Regulation (EU) 2019/94593 Commission Delegated Regulation (EU) 2019/945 of 12 March 2019 on unmanned aircraft systems and on third-country operators of unmanned aircraft systems (OJ L 152, 11.6.2019, p. 1). shall be allowed for a transitional period ending on 31 December 2023, subject to the following conditions:
(a) unmanned aircraft with a take-off mass of less than 500 g are operated within the operational requirements set out in points UAS.OPEN.020(1) of Part A of the Annex by a remote pilot having competency level defined by the Member State concerned;
(b) unmanned aircraft with a take-off mass of less than 2 kg is operated by keeping a minimum horizontal distance of 50 meters from people and the remote pilots have a competency level at least equivalent to the one set out in point UAS.OPEN.030(2) of Part A of the Annex;
(c) unmanned aircraft with a take-off mass of less than 25 kg is operated within the operational requirements set out in point UAS.OPEN.040(1) and (2) and the remote pilots have a competency level at least equivalent to the one set out in point UAS.OPEN.020(4)(b) of Part A of the Annex.
GM1 Article 22(b) Transitional provisions
ED Decision 2022/002/R
UAS OPERATIONS CLOSE TO PERSONS
When operating a UAS with a maximum take-off mass (MTOM) of up to 2 kg, the remote pilot may fly the UAS keeping a minimum horizontal distance of 50 m from uninvolved persons (please refer to GM1 Article 2(18) for additional information).
Article 23 - Entry into force and application94 This version of Article 23 is a compilation of the provisions related to the entry into force and application dates of Commission Implementing Regulations (EU) 2020/639, (EU) 2020/746, and (EU) 2021/1166. For the official version of each of those Regulations, please consult the Official Journal of the European Union.
Regulation (EU) 2022/425
1. This Regulation shall enter into force on the twentieth day following that of its publication in the Official Journal of the European Union.
It shall apply from 31 December 2020.
2. Article 5(5) shall apply from 1 January 2024;
3. Points UAS.OPEN.060(2)(g) UAS.SPEC.050(1)(l)(i) of the Annex shall apply from 1 July 2022 and point UAS.SPEC.050(1)(l)(ii) of the Annex shall apply from 1 January 2024.
4. Without prejudice to Article 21(1), until 31 December 2023 Member States may accept declarations made by UAS operators in accordance with Article 5(5), based on national standard scenarios or equivalent, if those national scenarios meet the requirements of point UAS.SPEC.020 of the Annex.
Such declarations shall cease to be valid from 1 January 2026.
5. Paragraph 3 of Article 15 shall apply from 1 January 2022.
This Regulation shall be binding in its entirety and directly applicable in all Member States.
Done at Brussels, 12 March 2019.
For the Commission
The President
Jean-Claude JUNCKER